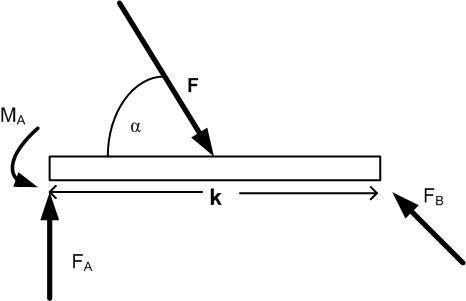
Abbildung 1: Eingespannter Balken
.
Version 5.0
© Prof. Dr. Uli Schell .
Zuletzt geändert am 16. Dezember 2013
.
In diesem Kapitel werden die Methoden
zur Lösung von Gleichungssystemen einschließlich der Hintergründe behandelt.
Beispiel 1 - 1:
In der Klasse 7c sind 31 Schüler. Die Zahl der Mädchen ist um 3 kleiner als die Zahl der
Jungen. Wie viele Jungen und Mädchen sind in der Klasse ?
| : Mädchen | : Jungen | |
Beispiel 1 - 2:
Drei Zahnräder eines Getriebes haben zusammen 80 Zähne. Bei 10 Umdrehungen des ersten
Rades drehen sich das zweite 18 und das dritte 45 mal. Wie viel Zähne hat jedes Rad
?
Beispiel 1 - 3:
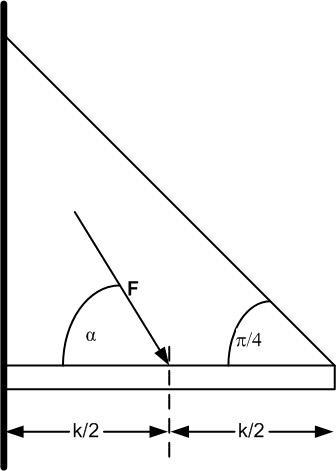
Balken in einem Lager
Ein Balken (Länge )
wird in einem festen Lager links eingespannt und rechts von einem Seil in
einem Winkel von 45 o gehalten. Eine Kraft F wirkt unter dem Winkel
auf die
Mitte des Balkens.
Fragestellung der Technischen Mechanik ist bei diesem Beispiel die Bestimmung der Kräfte
und des Moments
in Abhängigkeit
vom Winkel
der angreifenden Kraft F (’Drehachse’ links): .
.
.
.
3
Gleichungen, 3 Unbekannte .
Beispiel 1 - 4:
Verschnittkreuz
Gegeben sind die zwei (zu bestimmenden) Mengen
und
eines Weins mit dem
Säuregehalt
und ,
die zusammengemischt werden sollen zu einer (evtl. unbekannten) Gesamtmenge
und einem
Gesamtsäuregehalt .
Die Gleichungen dieses Systems lauten dann:
| + | = | |||
| + | = | |||
| + | = | |||
| + | = | |||
| + | = | |||
oder
Die gleichen Schritte werden nach der Multiplikation der ersten Gleichung mit
analog
durchgeführt:
| + | = | |||
| + | = | |||
| + | = | |||
.
Zum besseren Behalten dieser Gleichungen werden die Werte in einem (Verschnitt-)Kreuz
aufgetragen:
und
.
Lösung des Beispiels mit Maple:
restart; eq1 := x1+x2 = M;
eq2 := 3.8*x1+9*x2 = 6.0*M;
solve({eq1, eq2}, {x1, x2,M}) ergibt:
x1 + x2 = M
3.8 x1 + 9 x2 = 6.0 M
{M = 2.363636364*x2, x1 = 1.363636364*x2, x2 = x2}.
Also: ist frei wählbar,
daraus ergibt sich
und daraus wiederum die Gesamtmenge.
Beispiel 1 - 5 mt9001
Gegeben sind die drei (zu bestimmenden) Mengen
,
und
eines Weins mit
dem Alkoholgehalt
Vol %, Vol
% und
Vol % , die zusammengemischt werden sollen zu einer (evtl. unbekannten) Gesamtmenge
und einem
Gesamt-Alkoholgehalt
Vol %.
(1.267 l Alkohol entspricht 1 kg; auf der linken und rechten Seite steht aber der gleiche
Faktor.)
Gleichzeitig haben die Weine Säuregehalte von
,
und
,die zusammengemischt den
Ziel-Gesamtsäuregehalt
haben sollen. .
.
.
 .
.
Beispiel 1 - 6 mt9002
Gegeben sind die drei (zu bestimmenden) Mengen
,
und
eines Weins mit
dem Alkoholgehalt
Vol %, Vol
% und
Vol % , die zusammengemischt werden sollen zu einer (evtl. unbekannten) Gesamtmenge
und einem
Gesamt-Alkoholgehalt
Vol %.
(1.267 l Alkohol entspricht 1 kg; auf der linken und rechten Seite steht aber der gleiche
Faktor.)
Gleichzeitig haben die Weine Säuregehalte von
,
und
,die zusammengemischt den
Ziel-Gesamtsäuregehalt
haben sollen. .
.
.
 .
.
Die Systematik von linearen Gleichungssytemen kann diese Ergebnisse erklären.
Die Lösungsmenge eines linearen Gleichungssystem s bleibt bei Anwendung der folgenden Operationen unverändert erhalten (Äquivalente Umformungen eines linearen Gleichungssystems):
.
Beispiel 1 - 7
mt9003
.
| Zeilen- | Opera- | |||||
| summe | tion | |||||
| +I | ||||||
| + 5I | ||||||
.
.
.
 .
.
Gauß’scher Algorithmus
: Bringe das Gleichungssystem durch geeignete äquivalente Umformungen in Dreiecksform. Die
letzte Zeile enthält die Lösung für eine Variable. Diese Lösung wird in der
zweitletzten Zeile zur Bestimmung der zweiten Variablen verwendet usw.
Eine gebräuchliche Darstellungsform des Gleichungssystems ist die Matrixform
.
Sonderfälle:
:
n-reihige quadratische Matrix oder auch Matrix n-ter Ordnung .
Nullmatrix :
Matrix, deren Elemente sämtlich verschwinden .
Spaltenmatrix:
.
Zeilenmatrix:
.
Vertauschen von Zeilen und Spalten ergibt die Transponierte einer Matrix :
.
Beispiel:
.
.
Beispiel 1 - 8
.
.
.
.
.
.
.
=
Nebendiagonale
=
Hauptdiagonale
Zwei Matrizen
sind gleich, wenn
für
alle ,
also wenn alle ihre Elemente gleich sind.
für
.
Sind alle ,
so nennt man diese Matrix Einheitsmatrix
.
alle Elemente oberhalb oder unterhalb der Hauptdiagonalen verschwinden
Beispiel 1 - 9:
Untere Dreieicksmatrix:
.
.
Beispiel:
.
.
Beispiel: .
.
.
Beispiel 1 - 10
mt9005
.
.
.
.
.
 .
.
.
Beispiel 1 - 11:
.
Diese Operation ist nicht definiert .
für
alle .
.
Beispiel 1 - 12
mt9006
.
.
.
.
.
 .
.
| kommutativ: | |||
| assoziativ: | |||
| distributiv: | |||
Beispiel 1 - 13 mt9007
.
.
.
.
.
 .
.
und
.
Die Ergebnismatrix hat 3 Spalten und 2 Zeilen
.
Falk-Schema für die Multiplikation von Matrizen : .
.
Beispiel 1 - 14:
.
Multiplikation ist nur zulässig, wenn
.
Beispiel 1 - 15 mt9008
.
.
.
.
.
.
 .
.
Rechengesetze für die Matrixmultiplkikation:
| Assoziativität: | |||
| Distributivität: | |||
Die Matrixmultiplikation ist nicht kommutativ
Man kann jedoch bei Gleichungen mit Matrizen entweder auf beiden Seiten von links oder auf beiden
Seiten von rechts mit einer Matrix multiplizieren (vorausgesetzt natürlich, die Anzahl Spalten
bzw. Zeilen sind dazu passend): .
.
| umbilden in Matrix: | ||||||||
| 1. Spalte: , | 2. Spalte: | |||||||
| 3. Spalte: , | 4. Spalte: Konstante | |||||||
.
Das lineare Gleichungssystem kann geschrieben werden als
.
nz Koeffizienten:
Absolutglieder (Konstanten):
| mit | und | ||||
Entsprechend verfolgt jetzt der Gaußsche Algorithmus das Ziel, über äquivalente Umformungen die Matrix in ein gestaffeltes System (Dreiecksform) zu bringen durch die Schritte:
.
Beispiel 1 - 16
mt9026
.
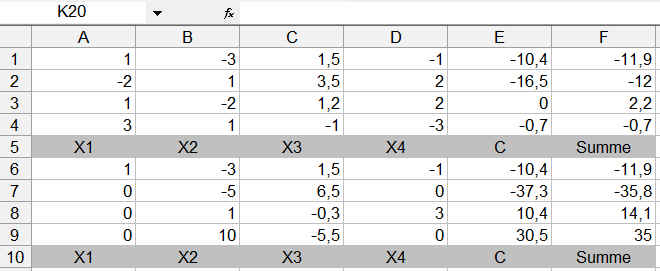
Lösen eines Gleichungssytems mit Excel : .
.
.
.
.
.
 .
.
.
Beispiel 1 - 17
mt9009
.
Lösung des obigen Beispiels: .
| umbilden in Matrix: | ||||||||
| 1. Spalte: , | 2. Spalte: | |||||||
| 3. Spalte: , | 4. Spalte: Konstante | |||||||
.
.
.
 .
.
Die Lösung eines linearen Gleichungssystems
erfolgt
durch Umformung in zwei, ggf. drei Schritten:
I. Vorwärtselimination mit
Ia. eventueller Pivotisierung (d.h. Vertauschen von Zeilen, bis die Diagonalelemente
)
II. Rückwärtselimination
I. Vorwärtselimination
| subtrahiere | -fache der 1.Zeile von 2.Zeile |
| ⋮ | -fache der 1.Zeile von 3.Zeile |
| ⋮ | ⋮ |
| subtrahiere | -fache der 2.Zeile von 3.Zeile |
| ⋮ | -fache der 2.Zeile von 4.Zeile |
| ⋮ | ⋮ |
II. Rückwärtselimination
Aus der Dreiecksform werden die Lösungen
durch
schrittweises Rückwärtseinsetzen gewonnen:
.
Sei eine
-Matrix, dann lautet das
Gleichungssystem mit
dem unbekannten Vektor :
Alternativ zum beschriebenen Gauß-Verfahren kann man auch die Koeffizientenmatrix noch weiter umformen, bis man
eine Einheitsmatrix
erhält. Damit können die Lösungen direkt abgelesen werden.
oder
Dies ist auch als Gauß-Jordan-Verfahren bekannt.
.
Beispiel 1 - 18
mt9025
.
Alternative Lösung des obigen Beispiels mit Gauß-Jordan: .
| umbilden in Matrix: | ||||||||
| 1. Spalte: , | 2. Spalte: | |||||||
| 3. Spalte: , | 4. Spalte: Absolutglied | |||||||
 .
.
.
Beispiel 1 - 19
mt9010
.
Zu lösen ist das Gleichungssystem .
.
.
.
 .
.
Beispiele zum Gauß’schen Verfahren
.
Beispiel 1 - 20
mt9011
.
Tragwerke
| nach | ||||
| nach | ||||
.
Pivotisieren:
.
.
.
 .
.
.
Beispiel 1 - 21
mt9012
.
.
.
.
.
 .
.
.
Beispiel 1 - 22
mt9013
.
.
.
.
 .
.
Ein Gleichungssystem hat
Gleichungssysteme
können wie folgt umgeformt werden: