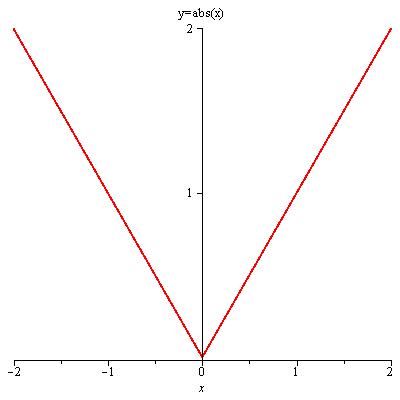
Man betrachtet also bei einer Betragsfunktion
eigentlich 2 Funktionen: .
Einmal und eine
zweite Funktion ,
.
wobei jeweils nur der positive ertebereich
betrachtet wird. .
Die Ursprungsfunktion setzt
sich aus beiden Funktionen
und .
abschnittsweise zusammen. .
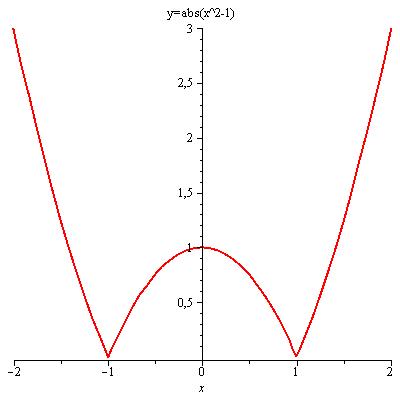
Beispiel 2 - 12:
:
0/1/3/0/1
0/1/3/0/2
Beispiel 2 - 13:
:
0/1/3/0/3
0/1/3/0/4
0/1/3/1
2.3.1 Vorgehen bei stetigen Komponenten
0/1/3/1/0
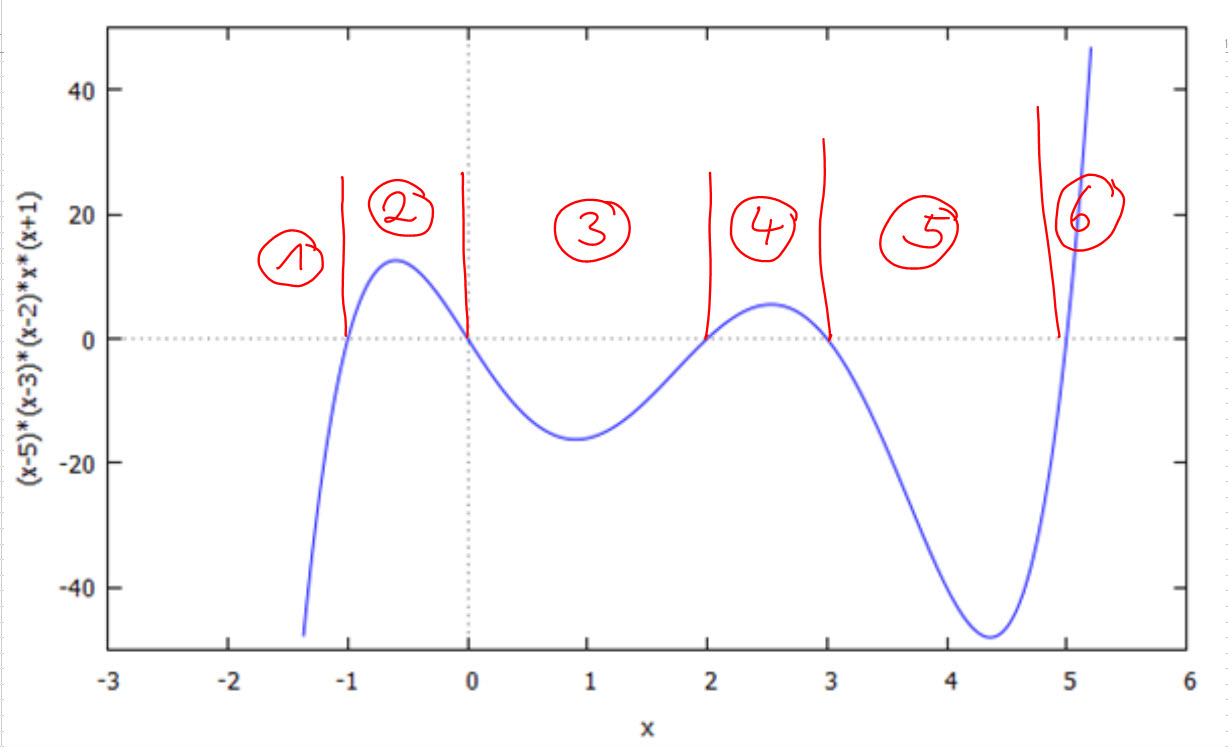
Sind die Argumente der Betragsfunktionen stetig, bestimmt man einfach die Nullstellen und unterteilt
in Intervalle. Das Vorzeichen überprüft man durch Einsetzen eines beliebigen x-Werts im
betreffenden Intervall. Das Betragszeichen kann entsprechend dieser Vorzeichenausprägung im
jeweiligen Intervall aufgelöst werden. (Die Fallunterscheidung kann durchaus mühsam werden.) .
Beispiel 2 - 14:
: .
0/1/3/1/1
0/1/3/1/2
0/1/3/1/3 .
Beispiel 2 - 12
.
Intervall-Unterteilung: .
| Intervall | 1 | 2 |
|
|
| | | |
| | |
|
|
| | | |
|
|
| | Gleichung: | | |
| | | |
| | | |
| |
. . .
. (Hinweis: Setzt man die Intervallgrenzen so, daß
in das rechte Intervall zu liegen
käme, würde als Lösung
aus dem intervall herausfallen.
ist aber eine zulässige Lösung.) .
0/1/3/1/4
Hat man mehrere Intervalle, bietet sich ein Tabellen-Schema zum systematischen Lösen an: .
0/1/3/1/5 .
Beispiel 2 - 13
.
. | Intervall | 1 | 2 | 3 |
|
|
|
| | | | |
|
|
|
| | | | |
| | | |
|
|
|
| | | | |
|
|
|
| | zusammen: | | | |
| | | | |
| | | | |
| |
. . .
.
.
0/1/3/1/6
0/1/3/2
2.3.2 Übungen
Bitte bearbeiten Sie die Übungen hier .
0/1/4
2.4 Ungleichungen
0/1/4/0
Während bei Gleichungen zwei Terme mit dem Gleichheitszeichen verknüpft werden, werden mit .
Ungleichungen Größenvergleiche formuliert und untersucht. Jede Ungleichung besteht aus zwei .
Termen, die durch eines der Vergleichszeichen .
(Kleinerzeichen), .
(Kleinergleichzeichen), .
(Größergleichzeichen) oder .
(Größerzeichen) verbunden sind. .
0/1/4/1
2.4.1 Äquivalenzumformungen
Die Regeln der Äquivalenzumformungen bei Gleichungen gelten bei Ungleichungen nur mit
wesentlichen Einschränkungen. .
- Addition, Subtraktion
- Multiplikation, Division mit positiven Werten
- Multiplikation mit negativen Werten:
| Aus | | wird | |
| Aus | | wird | |
| Aus | | wird | |
| Aus | | wird | |
| |
0/1/4/2
2.4.2 Bestimmen der Lösungen
0/1/4/2/0
Meist hilft der folgende Weg: Man bringt alle Glieder auf eine Seite und ersetzt zunächst das
Relationszeichen durch das Gleichheitszeichen. Ist diese neue Funktion stetig, bestimmt man einfach
die Nullstellen der Gleichung und unterteilt entsprechend in diese Intervalle. Nun setzt man dann
-analog zu Betragsgleichungen- im jeweiligen Intervall einen geeigneten x-Wert ein: Ist
die Relation für diesen x-Wert erfüllt, so ist dieses Intervall Teil der Lösungsmenge. .
Weist die Funktion Unstetigkeitsstellen auf, muss man an diesen Stellen jeweils in weitere Invervalle
unterteilen und je Intervall die Betrachtung anstellen. .
0/1/4/2/1 .
Beispiel 2 - 14
oder .
.
.
Die Nullstellen sind: .
. Wählt man nun für ,
so erkennt man schnell die Intervalle: . .
.
. .
0/1/4/2/2
0/1/4/3
2.4.3 Betragsungleichungen
0/1/4/3/0
Durch Fallunterscheidung wird wie bei den Betragsgleichungen in Bereiche unterteilt. Der weitere
Lösungsweg geht wie oben beschrieben. .
0/1/4/3/1 .
Beispiel 2 - 15
.
Zunächst: Betrachtung der Gleichung
.
Untervallunterteilung (Zahlenstrahl !):
. Fallunterscheidungen: | Int. | 1 | 2 |
|
|
| | | | |
|
|
| | | |
|
|
| | Gl. | | |
| | | |
| | | |
|
|
| | |
Jetzt: Betrachtung der Intervalle .
.
|
|
| | 1. | | Einsetzen von z.B. erfüllt Relation. . |
|
|
| | 2. | | Einsetzen von z.B. erfüllt Relation nicht. . |
|
|
| | 3. | | Einsetzen von z.B. erfüllt Relation nicht. . |
|
|
| | 4. | | Einsetzen von z.B. erfüllt Relation. . |
|
|
| | |
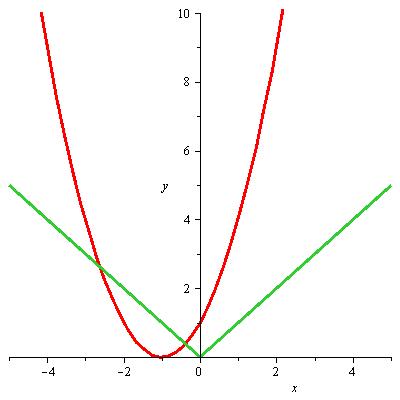
. . , .
, .
.
Zeichnen mit Maple: . . plot([abs(2*x-1),x],x=-10..10,y=-1..20) . . oder Maxima: . . plot2d([abs(2*x-1),x],[x,-5,5]); . . .
0/1/4/3/2
0/1/4/3/3 .
Beispiel 2 - 16
.
Fallunterscheidungen: | Int. | 1 | 2 | 3 | | | | | |
|
|
|
| | x+3 | <0 | <0 | >0 | | x+4 | <0 | >0 | >0 |
|
|
|
| | Gl. | | | |
| | | | |
| | | | |
| | | erfüllt im | |
| | | ganzen Intervall | |
| |
, .
, .
, .
.
alternativ mit Maple: .
solve(abs(x+3)-abs(x+4)<9,x) .
0/1/4/3/4
0/1/4/3/5 .
Beispiel 2 - 17
Stellen Sie die Ungleichung
in eine Betragsgleichung um .
.
.
Links und rechts muss der gleiche Betrag, aber mit unterschiedlichen Vorzeichen stehen .
.
.
.
0/1/4/3/6
0/1/4/3/7 .
Beispiel 2 - 18
.
Betragszeichenauflösung: . . Intervall I:
. .
Intervall II:
.
.
.
.
setzen:
.
.
.
Wie vor Intervalle untersuchen: .
.
Zeichnung mit Maple: .
.
0/1/4/3/8
0/1/4/4
2.4.4 Übungen
Bitte bearbeiten Sie die Übungen hier .
0/2
3 Funktionen und Kurven, Darstellung
0/2/0
0/2/1
3.1 Einleitung
0/2/1/0
0/2/1/1
3.1.1 Definition
Eine Funktion ist eine Vorschrift, die jedem Element x aus einer Menge
genau ein Element
y aus einer Menge
zuordnet. .
| x: | unabhängige Variable |
| |
| y: | abhängige Variable |
| |
0/2/2
3.2 Darstellungsformen
0/2/2/0
3.2.1 Wertetabelle
0/2/2/1
3.2.2 graphische Darstellung
.
0/2/2/2
3.2.3 analytische Darstellung
.
0/2/2/3
3.2.4 Parameterdarstellung
.
.
.
Parameterdarstellungen können unter Umständen durch Festlegung einer unabhängigen Variablen
(z.B. )
in eine Funktionsdarstellung umgeformt werden, indem man den Parameter (hier
)
eliminiert. Hierbei geht allerdings Information verloren (wann befindet sich ein Gegenstand wo
?).
Beispiel 3 - 1:
Auflösung .
.
0/2/3
3.3 Algemeine Eigenschaften von Funktionen
0/2/3/0
3.3.1 Nullstellen
für wird der
Funktionswert
0/2/3/1
3.3.2 Symmetrieverhalten
0/2/3/1/0
gerade Symmetrie oder -Achsensymmetrie:
0/2/3/1/1
0/2/3/1/2 ungerade Symmetrie oder Ursprungssymmetrie:
0/2/3/1/3
0/2/3/1/4 .
0/2/3/1/5 .
Beispiel 3 - 19
.
.
0/2/3/1/6
0/2/3/2
3.3.3 Übungen
Bitte bearbeiten Sie die Übungen hier .
0/2/3/3
3.3.4 Monotonie für
Monotonie kann in vier Fälle unterteilt werden. Eine Funktion
heißt .
| | monoton wachsend, wenn | | | |
| streng | monoton wachsend, wenn | | | |
| | monoton fallend, wenn | | | |
| streng | monoton fallend, wenn | | | |
| |
0/2/3/4
3.3.5 Periodizität
0/2/3/4/0
Eine Funktion heißt
periodisch , wenn zu jedem
auch zum
efinitionsbereich
gehört und
gilt.
Beispiel 3 - 20:
| | |
| |
0/2/3/4/1
0/2/3/4/2
0/2/3/5
3.3.6 Umkehrfunktion
0/2/3/5/0
Eine Funktion ist
umkehrbar, wenn aus
stets
folgt.
Bestimmung der Umkehrfunktion :
-
1.
- Vertauschen der Variablenbeziehung.
-
2.
- Auflösen nach der abhängigen Variablen.
0/2/3/5/1 .
Beispiel 3 - 20
.
| | | | |
| | | |
| | | | |
| | | | |
| |
.
0/2/3/5/2 .
Beispiel 3 - 21
.
| | | | |
| nicht umkehrbar |
| Sei | | | |
| | | | |
| |
.
0/2/3/5/3 Einschränkung des
efinitionsbereichs
auf
oder
macht
umkehrbar, denn dann ergibt sich durch Vertauschen der Variablen
.
0/2/3/5/4
0/2/3/5/5
Wichtig:
- Jede streng monoton wachsende/fallende Funktion ist umkehrbar.
- efinitionsbereich
und ertebereich
werden vertauscht.
- Zeichnerisch lösbar durch Spiegelung an der Geraden
0/2/3/6
3.3.7 Übersicht: Bestandteile einer Kurvendiskussion
- efinitionsbereich
efinitionslücken
- Symmetrie
- Nullstellen
- Pole, sekrechte Asymptoten
- Ableitungen (i.d.R. bis zur 3. Abl)
- relative Extremwerte (Minima, Maxima)
- Wendepunkte, Sattelpunkte
- Verhalten für
- ertebereich
- Zeichnen der Funktion
0/2/4
3.4 Lineare Transformationen
0/2/4/0
3.4.1 Koordinatentransformation
0/2/4/0/0
je nach Problemstellung läßt sich eine Lösung mit Hilfe einer Koordinatentransformation besser
erarbeiten.
0/2/4/0/1 .
Beispiel 3 - 22
.
| u | = | x - 1
| | v | = | y - 2
|
Transformationsgleichungen
.
.
Bestimmung der Lage der x-Achse: Setze y = 0, und man erhält v = -2. .
Bestimmung der Lage der y-Achse: Setze x = 0, und man erhält u = -1. .
.
0/2/4/0/2
.
mit und
wird
daraus
0/2/4/0/3 .
Beispiel 3 - 23
.
| | |
| |
| | | |
| |
| | | |
| |
| | | | | |
| |
.
.
.
0/2/4/0/4
0/2/5
3.5 Polarkoordinaten
0/2/5/0
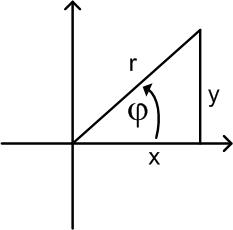
3.5.1 Polarkoordinaten im Zweidimensionalen
0/2/5/0/0
0/2/5/0/1
0/2/5/0/2
. .
| Abstandskoordinate | | | Winkelkoordinate | |
| |
.
Umrechnung zwischen Polarkoordinaten
.
.
.
.
0/2/5/0/3 .
Beispiel 3 - 24
Zahlenbeispiel .
Wie lautet die Polarkoordinatendarstellung des Punkts
? .
Der Punkt hat
den Abstand vom Ursprung .
. Er liegt im 3. Quadranten,
.
0/2/5/0/4
0/2/5/0/5 .
Beispiel 3 - 25
Zahlenbeispiel .
Gegeben ist ein Punkt
mit
und
Wie lautet die Darstellung des Punkts in kartesischen Koordinaten ? .
Der Punkt liegt im 3.
Quadranten und hat die x-Koordinate
und die y-Koordinate
0/2/5/0/6
0/2/5/0/7 .
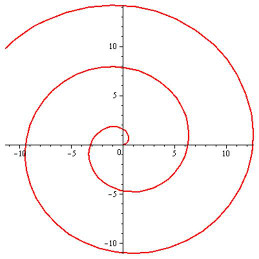
Beispiel 3 - 26
Archimedische Spirale .
| | | | | | | |
|
|
|
|
|
|
|
| | | | | | | | | |
| |
.
Darstellung: .
| | ist umkehrbar. |
| | | | |
| | | | |
| |
Nach
Elimination von
ist die Funktion nicht mehr umkehrbar !
.
.
| | | | | | | |
|
|
|
|
|
|
|
| | 0 | | | | | | |
| |
. Maple: . plot([t*cos(t), t*sin(t), t=0..15]) .
0/2/5/0/8
0/2/5/1
3.5.2 Polarkoordinaten im Dreidimensionalen
0/2/5/2
3.5.3 Zylinderkoordinaten
0/2/5/2/0
Bei den Zylinderkoordinaten werden die x- und y-Koordinaten wie Polarkoordinaten behandelt.
Zusätzlich kommt eine dritte Dimension z hinzu: .
0/2/5/2/1
0/2/5/2/2 .
| Abstandskoordinate | | | Winkelkoordinate | |
| |
.
.
Umrechnung zwischen Zylinderkoordinaten und kartesischen Koordinaten .
|
| |
| |
| |
| |
| |
.
0/2/5/3
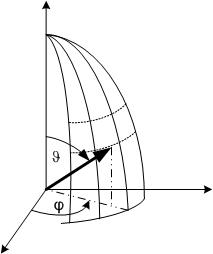
3.5.4 Kugelkoordinaten
0/2/5/3/0
Bei den Kugelkoordinaten wird ein Punkt durch einen Abstand und zwei Winkel beschrieben. .
0/2/5/3/1
0/2/5/3/2 .
| Abstandskoordinate | | | Azimuth | (Winkel zur x-Achse) |
| Poldistanz | (Winkel zur z-Achse) |
| |
.
Der Winkel überstreicht den
Bereich zwischen . Deshalb kann man
jeden Punkt beschreiben, wenn .
.
0/2/5/3/3 .
Beispiel 3 - 27
Umrechnung zwischen Kugelkoordinaten und kartesischen Koordinaten .
| Abstandskoordinate | | | Winkelkoordinate | |
|
|
|
|
| |
.
.
Hat man die Werte ,
lassen sich die anderen Werte einfach über die Beziehungen ermitteln: .
.
.
.
.
.
0/2/5/3/4
0/2/5/4
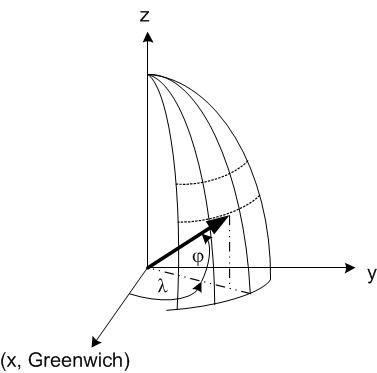
3.5.5 Kugelkoordinaten in der Geographie
0/2/5/4/0
Im World Geographic System (WGS84) -Standard werden Kugelkoordinaten eingesetzt. Allerdings
sind die Winkel (angegeben in Grad) anders festgelegt. .
0/2/5/4/1
0/2/5/4/2
| Breitenkoordinate (latitude) | |
| Längenkoordinate (longitude) | |
| |
. .
Die Breitenkoordinate liegt auf dem
Äquator, die Längenkoordinate
geht durch Greenwich (Meridian des Flamsteed House des Royal Greenwich Observatory in London). .
Demzufolge überstreicht die Latitude
den Bereich zwischen
S(üd)
N(ord). .
Die Longitude überstreicht
den Bereich zwischen
W(est)
E(st). .
Bei einem Erdumfang von 40.000 km errechnet sich der Erdradius zu ca. 6366 km, der Äquatorradius
liegt bei 6378 km. .
Koordinaten von Pirmasens: 49 °12’ 44” N und 07 °36’ 12” E .
Umrechnungen: .
| 1 Breitengrad | 111 km |
| 1 Breitenminute | 1,852 km oder 1 nautische Meile |
| 1 Breitensekunde | ca. 30 m |
| 1 Längengrad am Äquator | 111 km |
| 1 Längengrad in Pirmasens | ca. 72 km |
| |
0/2/5/4/3 .
Beispiel 3 - 28
Zahlenbeispiel .
Der Flughafen Frankfurt-Hahn liegt auf 49 °56,92’ N und 07°15,83’ E .
Der Flugplatz Pirmasens liegt auf 49 °12,57’ N und 07°24,04’ E .
Wie weit sind die beiden Orte voneinander entfernt ? .
(Nehmen Sie an, daß Längen- und Breitengrade rechtwinklig zueinander stehen) .
.
1 Breitenminute = 1,852 km . 1 Längenminute = 1,852* sin(90 °- Breite) . .
.
Abstand . .
0/2/5/4/4
0/2/5/4/5 .
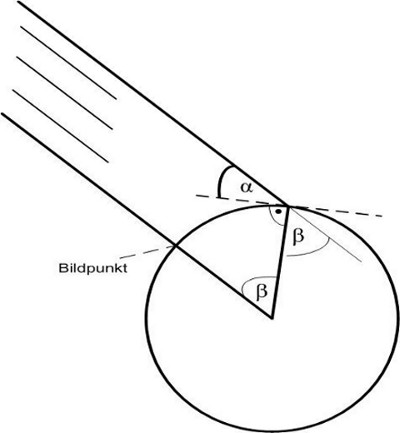
Beispiel 3 - 29
Der Sextant .
Es gibt immer einen Punkt auf der Erde, über dem die Sonne senkrecht steht, dem (Sonnen-)Bildpunkt.
Dieser wird für die jeweilige Zeit im ’nautischen Jahrbuch’ veröffentlicht. (Natürlich kann man ihn
auch selbst berechnen.) .
.
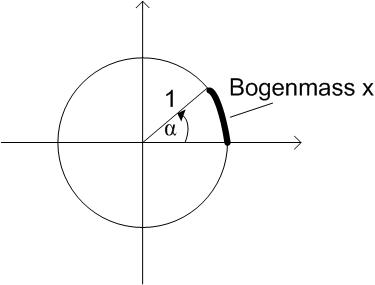
Der Winkel
im Bogenmass mal Erdradius (ca. 6400 km) gibt den Abstand des Beobachters vom Bildpunkt an. .
oder für Seemänner: . Der Winkel
umgerechnet in Bogenminuten gibt den Abstand des Beobachters vom Bildpunkt in nm an. .
Der Sonnenbildpunkt bewegt sich mit einer Geschwindigkeit von 0,25 Seemeile pro Sekunde auf der
Erdoberfläche (
pro Tag!). . Kenne ich die Koordinaten des Sonnenbildpunktes zum Zeitpunkt der Messung und die
Himmelrichtung, kann ich daraus meine Position bestimmen. .
(Lehrbücher: Abstand in sm = 60 * arccos(sin BG * sin BB + cos BG * cos BB * cos(LB-LG)) .
BB = Breite Bildpunkt .
LB = Länge Bildpunkt .
BG = Breite geschätzte Position .
LG = Länge geschätzte Position .
0/2/5/4/6
0/3
4 Computer Algebra Systems
0/3/0
0/3/1
4.1 Übersicht
Computer Algebra Systems sind Hilfsmittel, um schnell
- Werte berechnen zu lassen
- z.B.
an der Stelle x = 0.5; f : x ^4 + sqrt(x), x = 0.5;
- Gleichungen zu lösen:
- eg : x ^2 - 2 x = sqrt(x);
- solve(eg, x);
- uneq : x ^2 - 4 x
abs(x);
- to_poly_solve(uneq, x);
- sich einen Überblick über Funktionen zu verschaffen (Skizze):
- wxplot2d([x^2], [x, -2, 2]);
- wxplot2d([lhs(eq)],[x, 0, 4]);
- wxplot2d([lhs(eq),rhs(eq)], [x, 0, 4]);
- Gleichungen zu vereinfachen: ratsimp(x ^4*x ^5);
- Gleichungen ausmultiplizieren: expand((5 * x + 4) ^2); ergibt 25 x ^2 + 40 x +
16
Gebräuchliche CAS-Systeme sind z. B.
- Maple
- Mathematica
- Mupad oder
- SCILAB (Open Source).
Besonders empfehlenswert ist neuerdings auch Maxima (Open Source). Die Dokumentation hierzu
finden Sie hier im Materialordner unter ’Anleitungen’. .
Bei den obigen Beispielen wurde Maxima (mit der Oberfläche wxMaxima ) eingesetzt.
0/3/2
4.2 Beispiel Maxima
0/3/2/0
0/3/2/1
4.2.1 Erster Einstieg
Nach dem Aufruf von wxMaxima erhält man einen leeren Bildschirm mit einer Menüleiste. Gibt
man etwas Auswertbares ein, zum Beispiel 2+5 und schließt mit STRG + ENTER ab, wird die
Eingabe (%i1) wiederholt und das Ergebnis (%io1) schwarz angezeigt. Mehrere Eingaben in einer
Zeile müssen mit jeweils einem Semikolon getrennt werden. Das aktuelle Ergebnis kann mit %
weiterverwendet werden. Die Eingaben der einzelnen Bereiche können nachträglich verändert
werden. Durch erneutes Drücken der Tasten STRG + ENTER wird das Ergebnis neu
berechnet.
0/3/2/2
4.2.2 Auswertung der Eingaben, Kontextmenü
Schließt man eine Eingabe mit STRG + ENTER ab, wird das Ergebnis unterhalb angezeigt. Alle
Ergebnisse werden durchnummeriert mit i1, i2 bzw. o1, o2 usw. Dadurch kann auf einzelne
Ergebnisse zugegriffen werden. Mit % kann das letzte berechnete Ergebnis weiterverwendet
werden. Durch den Befehl ’float’ können Brüche in eine Fließkommazahl umgewandelt
werden.
Einige ausgewählte Toolbox-Optionen:
|
| | % | man greift auf das letzte Ergebnis zu |
|
| | $ | Ergebnis wird nicht ausgegeben, nur intern berechnet |
|
| | F1 | Hilfe zu den jeweiligen Eingaben |
|
| | |
Alternativ zur Eingabe von Befehlen, kann auch die Menüleiste zur Eingabe von Aufgaben
dienen.
0/3/2/3
4.2.3 Auswertung von Summenformeln und Produktformeln
Häufig werden umfangreichere Summen durch Summationszeichen ausgedrückt.
Beispiel 4 - 1:
Vereinbarung einer Summenformel
Es soll für die Variable
die Summe der Zahlen von 1 bis 5 bestimmt werden, wenn eine Formel
angegeben wurde.
ist hierbei die ’ Laufvariable
’. Unterhalb des -Zeichens
steht hierbei die Vereinbarung der Laufvariablen und die Untergrenze, oberhalb des
-Zeichens
steht die Obergrenze.
Von Hand ausgerechnet bedeutet dies:
. .
(Vorschlag von Gauss: Addiere ).
.
.
Eine Formel
ergäbe: .
Maxima stellt hierfür den Befehl ’sum(i^2, i, 2, 4);’ zur Verfügung. .
Beispiel 4 - 2:
Vereinbarung einer Produktformel
Auch für Produkte gibt es eine solche Vereinbarung:
.
In Maxima wird hierfür eingegeben: ’product(1/k, k, 1, 4);’ und man erhält:
.
0/3/2/4
4.2.4 Primfaktorzerlegung, GGT, KGV
Für eine ganze Zahl oder Bruchzahl n ergibt ’factor(n)’ eine Primfaktorenzerlegung
.
Beispiel 4 - 3:
’factor(120);’ ergibt .
Beispiel 4 - 4:
’factor(-125/1764);’ ergibt .
.
Für zwei Zahlen ergibt gcd(zahl1, zahl2) den größten gemeinsamen Teiler ( GGT ).
Beispiel 4 - 5:
’gcd( 540, 210);’ ergibt: 30.
Für zwei Zahlen ergibt ’lcm( ,);’ das kleinste gemeinsame Vielfache ( KGV
).
Beispiel 4 - 6:
’lcm( 540, 210);’ liefert: 3780.
0/3/2/5
4.2.5 Lösen von Gleichungssystemen
Auch das Lösen von Gleichungssystemen kann von Maxima vorgenommen werden.
Beispiel 4 - 7:
Lösen eines LGS
- eq1 : a + b + c = 6;
- eq2 : a * b + c = 5;
- eq3 : a + b * c = 7;
- s: solve([eq1, eq2, eq3], [a, b, c]);
Die Lösung der Variablen werden nacheinander in einer eckigen Klammer angezeigt.
0/3/2/6
4.2.6 Darstellung von Matrizen
Matrizen können ebenfalls mit Maxima bearbeitet werden. Die Darstellung erfolgt mit dem Befehl
’matrix()’.
Beispiel 4 - 8:
Darstellung einer Matrix
Die Eingabe von ’m:matrix([7,8][4,6])’ stellt die Matrix
dar.
Um eine inverse Matrix zu bilden verwendet man den Befehl ’invert()’, um die Determinante zu bilden
den Befehl ’determinant()’ und zur Multiplikation zweier Matrizen wird der Punkt ’.’
genutzt.
0/3/2/7
4.2.7 Differenzieren und Integrieren
Differenzieren ist mit der Funktion ’diff()’ möglich.
Beispiel 4 - 9:
Differenzieren
- diff(x^2,x);
- diff(sin(x),x);
- diff(%e^(3 * x + 1 / x), x);
Zur Integralbildung dient der Befehl ’integrate()’.
Beispiel 4 - 10:
Integration
- Unbestimmte Integrale
- integrate(x^2,x);
- integrate(cos(2 + 9 * x), x)
- Bestimmte Integrale
- integrate(x^2, x, -1, 1); Berechnet die Fläche von -1 bis 1.
- integrate(sin(x), x, 0, %pi); Berechnet die Fläche zwischen 0 und .
0/3/2/8
4.2.8 Zeichnen von Graphen
Mit Hilfe des Befehls wxplot2d() lassen sich elegant Zeichnungen von Funktionen erstellen. Beispiele:
- wxplot2d([x^2], [x, -10 ,10])$
zeichnet die Funktion
zwischen x = -10 ..10
- wxplot2d([x^2], [x, -4 ,4])$
zeichnet die Funktion
zwischen x = -4 ..4
- wxplot2d([x^2], [x, -4, 4], [y, 0, 10])$
zeichnet die Funktion
zwischen x = -4 ..4 und y = 0 ..10
- wxplot2d([cos(x), sin(x)], [x, 0, 2*%pi])$
zeichnet die Kurven
und
in das gleiche Bild
0/4
5 Reihen, Grenzwert und Stetigkeit
0/4/0
0/4/1
5.1 Reelle Zahlenfolgen (geordnete Menge diskreter Zahlen)
0/4/1/0
5.1.1 Definitionen
bezeichnet man als Folge .
ist die
Zuordnungsvorschrift.
Meist beginnen Folgen mit
als erstem Folgeglied.
Beispiel 5 - 1:
| | , | , | , | , | | |
| |
| |
| | , | , | , | , | | |
| |
aber auch:
-
(rekursive Definition)
- durch Tabellen .
.
|
|
|
|
|
|
|
|
|
| | n | | | | | | | | | |
|
|
|
|
|
|
|
|
|
| | | | | | | | | | |
|
|
|
|
|
|
|
|
|
| | |
- Zahlengerade
- in einem Funktionsgraphen
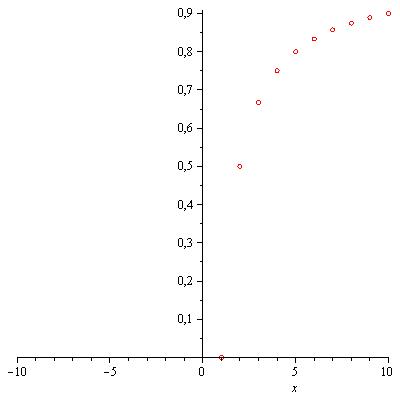
plot(1-1/x, sample=[1,2,3,4,5,6,7,8,9,10,11],style=point, adaptive=false,symbol=circle)
Alle Glieder dieser Folge sind kleiner als 1. Mit zunehmenden Index werden die Glieder der Folge
größer und unterscheiden sich immer weniger von 1.
0/4/1/1
5.1.2 Folgen am Beispiel von Zinsen
0/4/1/1/0
In der Finanzwelt spricht man von
- Kapital oder Kapitalanlage
Das ist der geliehene oder verliehene Geldbetrag
- Zinssatz p
Das ist der Wert, der zum Ende einer Periode den Zins festlegt. Er wird in Prozent als
ausgedrückt. Alternativ kann er auch als Zinsrate r (als Bruchteil) angegeben werden.
Beispiel 5 - 2:
Der Zinssatz p von 10 % entspricht einer Zinsrate r von 0,1, also
.
- Zinsperiode
Die Zinsperiode legt die Zeit fest, ’zu der die Zinsen zu bezahlen sind’.
Am Ende eines Jahres wird bei einer jährlichen Zinsperiode und dem Zinssatz p bzw. der Zinsrate r
aus der Kapitalanlage ein neues Kapital festgestellt:
.
Läßt man diese Kapitalanlage nun zum gleichen Zinssatz eine weitere Periode angelegt, so entsteht
aus diesem Kapital durch Zinsen ein neuer Wert:
.
Nach n Zinsperioden entsteht aus dem Kapital der Wert:
.
0/4/1/1/1 .
Beispiel 5 - 30
Verzinsungsperioden
- Ein Kapital von � 5 000.- wird auf 5 Jahre angelegt und mit 4 % jährlich verzinst.
Wieviel Kapital steht nach dieser Zeit zur Verfügung ?
- Nun wird mit der Bank halbjährliche Berechnung vereinbart. Die Periode sowie die
Zinsrate halbiert sich damit. Dann entsteht welches Kapital ?
.
Antwort:
-
� 6083,26 .
-
� 6094.97 .
.
0/4/1/1/2 Berechnet man für ein Kapital die Zinsen
über das ganze erste Jahr und bildet das Verhältnis der beiden Werte
, kann
hiermit ein effektiver Zinssatz berechnet werden.
Die effektive Zinsrate R bei einer Zinsrate r und n Perioden ist
.
Achtung: Gesetzliche Festlegungen können auch die Hinzurechnung von Kosten
und Gebühren verlangen. Dann entstehen andere Ergebnisse. Die augenblickliche
Preisangabenverordnung PAngV (ISMA) gibt eine Berechnung für den effektiven Zinssatz
für eine
Laufzeit ,
Anfangskapital
und Endkapital
vor:
0/4/1/2
5.1.3 arithmetische Reihen
Bei arithmetischen Reihen ist die Differenz d zwischen zwei Folgegliedern konstant:
Zur Bildung einer Summe addiert man zunächst das größte zum kleinsten Glied,
dann das zweitgrößte zum zweitkleinsten Glied usw. Diese Teilsummen sind
gleich. Im Fall der ersten n natürlichen Zahlen erhält man so als Teilsumme
, was zum
Ergebnis
führt.
0/4/1/3
5.1.4 geometrische Reihen
Man kann sich die Entstehung geometrischer Reihen so vorstellen, daß ausgehend von zwei Werten a
und k eine Summe gebildet wird (ausgehend von a wird n-mal mit k multipliziert):
.
Die Summe kann man durch einen Trick ermitteln: man multipliziert beide Seiten mit
k:
.
Subtrahiert man beide Gleichungen, erhält man
oder
oder
. .
Damit wird .
0/4/1/4
5.1.5 Grenzwert einer Folge
0/4/1/4/0
Gibt es eine natürliche Zahl ,
sodass für
gilt?
Konvergenz.
0/4/1/4/1 .
Beispiel 5 - 31
Beispiele für die Folgen:
-
-
.
Sind die Folgen konvergent ?
(Nullfolge)
Konvergent
-
Divergent
.
0/4/1/4/2
0/4/2
5.2 Grenzwerte von Funktionen
0/4/2/0
5.2.1 Grenzwert einer Funktion
:
Annäherung von rechts
:
Annäherung von links
0/4/2/1
5.2.2 Grenzwert für
0/4/2/1/0 .
Beispiel 5 - 32
Annäherung von rechts: . .
.
|
|
|
|
| | | | | |
|
|
|
|
| | | | | |
|
|
|
|
| | |
. .
.
|
|
|
|
| | | | | |
|
|
|
|
| | | | | |
|
|
|
|
| | |
.
Funktionswert
für ist
definiert.
0/4/2/1/1
Dies führt zum Grenzwertbegriff:
Eine Funktion sei in
einer Umgebung von
definiert. Guilt dann für jede im Definitionsbereich der Funktion liegende und gegen die Stelle
konvergierende
Zahlenfolge
stets .
,
so heißt der
Grenzwert von
an der Stelle .
0/4/2/1/2 .
Beispiel 5 - 33
Für die Funktion
soll gelten: .
ist
für
und
für
Gibt es einen Grenzwert ? .
.
Da der linksseitige Grenzwert mit dem rechtsseitigen Grenzwert nicht übereinstimmt, besitzt die
Funktion keinen Grenzwert.
.
0/4/2/1/3
0/4/2/1/4 .
Beispiel 5 - 34
Die Funktion
an der Stelle x = 4:
.
ist zwar an x=4 nicht definiert, besitzt aber Grenzwert. . .
0/4/2/1/5
0/4/2/2
5.2.3 Grenzwert für
.
.
.
Beispiel 5 - 35:
.
.
0/4/2/3
5.2.4 Rechenregeln für Grenzwerte
-
1.
- ,
wobei
= konstant.
-
2.
-
-
3.
-
-
4.
-
-
5.
-
-
6.
-
-
7.
Beispiel 5 - 36:
| | | | |
| |
0/4/3
5.3 Stetigkeit einer Funktion
0/4/3/0
5.3.1 Definition
0/4/3/0/0
Eine Funktion ist in einer gewissen Umgebung von
stetig, wenn der Grenzwert vorhanden ist und mit Funktionswert übereinstimmt.
Beispiel 5 - 37:
ist in der
Umgebung
stetig.
0/4/3/0/1 .
Beispiel 5 - 35
Für
soll gelten: .
für
für
für
Ist stetig
für ?
.
linksseitiger Grenzwert:
rechtsseitiger Grenzwert:
Funktion in der
Umgebung von
nicht stetig.
.
.
0/4/3/0/2
.
0/4/3/0/3 .
Beispiel 5 - 36
.
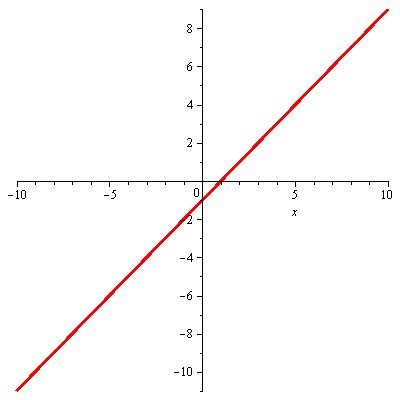
Definitionslücke bei
. (Weder stetig noch unstetig) . .
| x2-1
x+1 = x - 1 | für | x≠ - 1
| | -2 | für | x = -1 | x- 1
Behebung einer Definitionslücke. .
Zeichnen: .
;
(Maple) .
bzw ;
(Maxima) .
.
0/4/3/0/4
0/5
6 Arithmetische Funktionen
0/5/0
6.1 Ganzrationale Funktionen (Polynomfunktionen)
0/5/0/0
6.1.1 Grad von Polynomfunktionen
: Grad
des Polynoms. 0/5/0/1
6.1.2 Polynome vom Grad 1: lineare Funktionen
. .
Beispiel 6 - 38:
Gesamtmengen
x sei die Menge eines Weinvorrats, m sei dessen Alkoholgehalt. Dann ergibt sich hieraus die Gesamtmenge
an Alkohol zu .
Häufig wird das Hundertfache des Gehalts als Prozentwert angegeben.
0/5/0/2
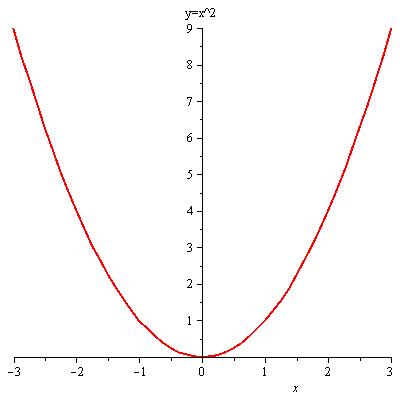
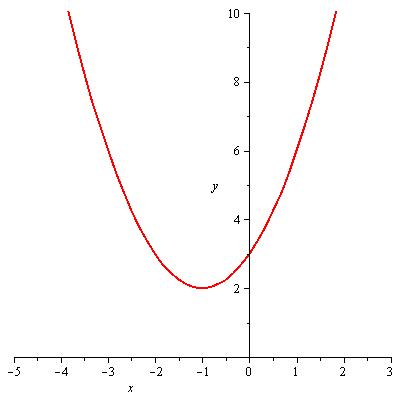
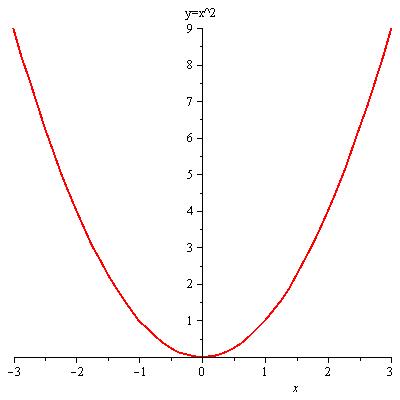
6.1.3 Polynome vom Grad 2: quadratische Funktionen
0/5/0/2/0
Allgemeine Form: .
.
gibt an, ob die Funktion nach unten (konkav) oder nach oben (konvex) geöffnet ist: .
.
.
.
Die Scheitelpunktform
erhält man durch quadratische Ergänzung:
.
Die Produktform erhält man durch Abspaltung der Nullstellen:
0/5/0/2/1 .
Beispiel 6 - 38
Das Polynom
.
Produktform: . Das Polynom hat
die Nullstellen .
. (Ausprobieren durch Ausmultiplizieren !) . Mit dem Vorfaktor 2 kann man die Gleichung umschreiben zu: . .
. Quadratische Ergänzung: . .
.
Scheitelpunkt: (2,-2)
0/5/0/2/2
0/5/0/3
6.1.4 Polynomfunktionen höheren Grades
0/5/0/3/0
Abspaltung von Linearfaktoren
0/5/0/3/1 .
Beispiel 6 - 39
.
Finden
der ersten Nullstelle | | | | | | |
| | |
| | | |
| | | |
| | | | |
| | | | |
| | | | |
| |
Finden
weiterer Nullstellen, abspalten weiterer Linearfaktoren
.
0/5/0/3/2 Bei doppelten Nullstellen wird analog verfahren.
ist vom
Grade
gibt
die Anzahl reeller Nullstellen an.
0/5/0/3/3 .
Beispiel 6 - 40
.
Finden
der ersten Nullstelle | | | | | | |
| | |
| | | |
| | | |
| | | | |
| | | | |
| | | | |
| | | | |
| |
Finden
weiterer Nullstellen, abspalten weiterer Linearfaktoren Division von
durch 3 ergibt
. Weitere Beispiele: . ergibt
mit .
Der erste Term hat eine komplexe Nullstelle. . .
.
Eine Polynomfunktion 3. Grades besitze bei
eine doppelte und bei
eine einfache Nullstelle und schneidet die x-Achse bei
. Bestimmen Sie die
Gleichung der Funktion !
.
0/5/0/3/4
0/5/0/4
6.1.5 Horner-Schema
0/5/0/4/0
Das Horner-Schema ist ein elegantes Schema zur Berechnung von Funktionswerten.
0/5/0/4/1 .
Beispiel 6 - 41
Zu bestimmen ist
für die Funktion
.
.
0/5/0/4/2
Vorgehen:
- Lückenloses Aufschreiben der Koeffizienten in 1. Zeile.
- 1. Koeffizient herunterholen.
- mit Argument multiplizieren und in 2. Spalte.
- mit 2. Koeffizient addieren etc.
-
Das Ergebnis steht rechts unten
Ist eine
Nullstelle, dann stehen in der unteren Zeile die Koeffizienten des reduzierten Polynoms. Dies soll am
Beispiel eines Polynoms dritten Grades verdeutlicht werden: .
.
.
.
Für die Koeffizienten gilt: .
.
.
. .
Die Restfunktion
ist echt gebrochen: .
.
Im Zähler tritt genau der Funktionswert von
an der Stelle auf. Die
Restfunktion verschwindet
an der Nullstelle .
Damit wird .
.
0/5/0/4/3 .
Beispiel 6 - 42
Zu bestimmen ist
für die Funktion
mit dem Horner-Schema. Daraus sind ggf. die Koeffizienten des reduzierten Polynoms zu bestimmen. .
.
0/5/0/4/4
0/5/0/4/5 .
Beispiel 6 - 43
Bestimmen Sie die Koeffizienten des reduzierten Polynoms für
mit dem
Horner-Schema.
.
.
0/5/0/4/6
0/5/0/5
6.1.6 Übungen
Bitte bearbeiten Sie die Übungen hier .
0/6
7 Gebrochenrationale Funktionen
0/6/0
7.1 Nullstellen und Polstellen
0/6/0/0
7.1.1 echt und unecht gebrochen rationale Funktionen
0/6/0/0/0
| | | Echt gebrochen rational |
| | | | Unecht gebrochen rational |
| |
Schritte: .
-
1.
- Zerlegen von Zähler und Nenner in Linearfaktoren (beseitigen von efinitionslücken)
-
2.
- Linearfaktoren Zähler
Nullstellen.
-
3.
- Linearfaktoren Nenner
Polstellen.
Ermitteln ()
einer ersten Lösung
Polynomdivision ()
- Reduktion des Polynom-Grades.
- Auflösung für Polynome
3. Grades.
Kürzung gemeinsamer Faktoren in Zähler und Nenner.
0/6/0/0/1 .
Beispiel 7 - 44
.
.
. . Zähler ,
: .
.
,
: .
.
,
: .
Nenner: ,
: .
.
,
.
Beseitigung der
Definitionslücken ()
.
.
.
.
Maple:
.
Maxima: partfrac (1/(1+x)^2 - 2/(1+x) + 2/(2+x), x); .
.
0/6/0/0/2
0/6/0/1
7.1.2 Nullstellen
0/6/0/1/0
Ein Polynom vom Grad
hat
(komplexe) Nullstellen ( Fundamentalsatz der Algebra )
0/6/0/1/1 .
Beispiel 7 - 45
Fall 1:
.
Fall 2: keine
reelle Lösung .
.
0/6/0/1/2
Linearfaktorzerlegung; Die Nullstellen des Zählers sind (nach Kürzen) die Nullstellen des
Polynoms.
0/6/0/1/3 .
Beispiel 7 - 46
.
Zähler:
. Nenner hat keine rellen Nullstellen . .
Maple:
.
.
0/6/0/1/4
0/6/0/2
7.1.3 Definitionslücken
- behebbar, wenn Zähler und Nenner eine Nullstelle der gleichen Ordnung aufweisen.
- Ist die Ordnung der Nullstelle des Zählers größer als die des Nenners, weist der Bruch
Nullstellen (sowie möglicherweise behebbare Definitionslücken) auf.
- Ist die Ordnung der Nullstelle des Nenners größer als die des Zählers , weist der
Bruch nicht behebbare Definitionslücken ( Pole sowie möglicherweise weitere, auch
behebbare Definitionslücken) auf. .
0/6/0/3
7.1.4 Asymptotisches Verhalten
0/6/0/3/0 .
Beispiel 7 - 47
Beispiele für Polstellen: .
.
:
Vorzeichenwechsel, kein Grenzwert ! . : kein
Vorzeichenwechsel . : je ein
Vorzeichen-wechsel .
.
0/6/0/3/1
(vgl.Rechenregeln für Grenzwerte)
Bestimmung der Asymptoten
- echt gebrochen rational
- unecht gebrochen rational: Aufteilung in ganzrationale Funktion und echt gebrochen
rationale Funktion.
0/6/0/3/2 .
Beispiel 7 - 48
.
Nullstelle=x=7, Faktor 2 ausklammerbar: . .
.
.
.
plot((x pow 2 -2x)/(x-2),x=-5..5) plot((1/x),x=-5..5) . Weiteres Beispiel: . .
.
.
Weit. Beispiel: .
.
.
0/6/0/3/3
0/6/0/4
7.1.5 Partialbruchzerlegung
Ziel der Partialbruchzerlegung ist eine Vereinfachung gebrochenratiohaler Funktionen, um sie
beispielsweise besser integrieren zu können. Vorgehen:
- Bestimmung reeller Nullstellen des Nenners.
- Jeder Nullstelle wird ein Partialbruch zugeordnet.
-
(einfache Nullstelle) .
-
(zweifache Nullstelle) .
-
(dreifache Nullstelle) .
-
-
(-fache
Nullstelle) .
- Liegen weitere nicht-reelle Nullstellen des Nenners vor (z.B.)
,
so gehört dazu ein Partialbruch mit dem Zähler
etc. .
- Die echt gebrochen rationale Funktion ist die Summe der Partialbrüche.
Die Konstanten ,
…kann man durch Koeffizientenvergleich oder durch geschickte Wahl von Nullstellen etc.
bestimmen.
Beispiel 7 - 49:
, mit
und
.
.
.
.
. .
.
Daraus folgt .
.
.
Diese Beziehungen müssen für beliebige
erfüllt sein. .
1. Koeffizientenvergleich: .
.
.
.
.
oder .
2. geschickte Wahl von x, damit man Nullstellen erhält:
| | | | | | |
| | | |
| | | |
| |
| | | = | |
| |
.
0/6/0/5
7.1.6 Übungen
Bitte bearbeiten Sie die Übungen hier .
0/6/1
7.2 Interpolationspolynome
0/6/1/0
7.2.1 Interpolationspolynome nach Newton
0/6/1/0/0
Fragestellung: -Messpaare
liegen vor. Gesucht ist nun ein Interpolationspolynom , das die Werte möglichst exakt beschreibt. .
.
.
1. Möglichkeit .
| | |
| | | |
| | | |
| |
.
.
-
Bei vielen Messwerten wird das Ermitteln der Koeffizienten aufwendig. Besser ist dann das Arbeiten
mit Linearfaktoren. Dies leistet das Verfahren der Polynom-Interpolation nach Newton
+ …+
…
gegeben: Wertepaare …
-
1.
- Betrachtung von nur
Es reicht das Polynom von Grad 0
-
2.
- Hinzunehmen von Punkt
-
3.
- Hinzunehmen von Punkt
-
4.
- -Stützstellen
+ …+
…
Bestimmung der Koeffizienten
| | | | |
| | | | | |
| | | | | |
| |
| | |
| | | | | |
| | | |
| |
| | |
Rekursionsformel:
| | |
| | | |
| | | |
| |
Beispiel 7 - 50:
| | | | | | |
| | | | | | | |
| | |
| | | | | | | |
| | |
| | | | | | | | |
Rechenschema:
| |
| | | |
| | | | |
| | | | | |
| | | | |
| | | |
| | |
| |
0/6/1/0/1 .
Beispiel 7 - 49
.
.
| | | | |
| |
| | | |
| | | |
| | | |
| |
| |
Weitere Stützstelle :
| | | | |
| |
| | | |
| | | |
| | | | | |
| | | |
| | | |
| |
.
Maple: newton.mws.mw
.
0/6/1/0/2
0/7
8 Potenz- und Wurzelfunktionen
0/7/0
0/7/1
8.1 Potenzen
0/7/1/0
8.1.1 Potenzbegriff
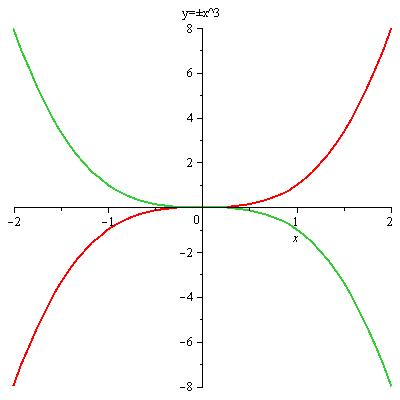
Ist
gerade
ist eine
gerade Potenzfunktion .
Ist
ungerade
ist eine
ungerade Potenzfunktion .
Beispiele für Potenzen:
| | |
| | | |
| | | |
| | | |
| | | |
| | |
| pico | | |
| nano | | |
| mikro | | |
| milli | | |
| | |
| kilo | | |
| mega | | |
| giga | | |
| |
0/7/2
8.2 Wurzelfunktionen
0/7/2/0
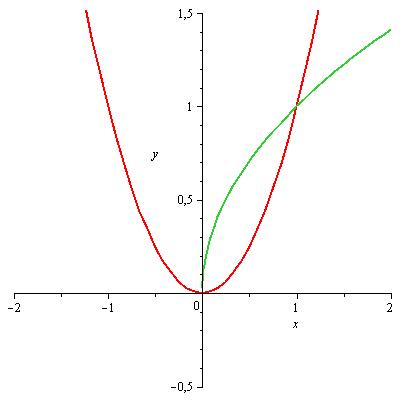
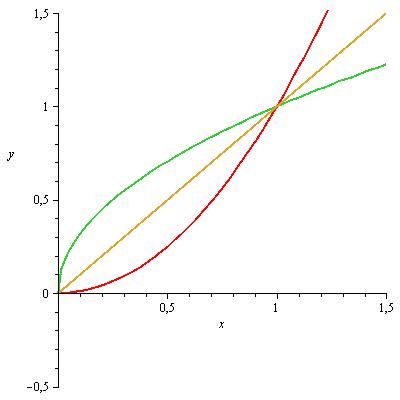
8.2.1 Umkehrbarkeit
0/7/2/0/0
Quadtratische Funktionen sind nicht umkehrbar, solange
0/7/2/0/1
0/7/2/0/2
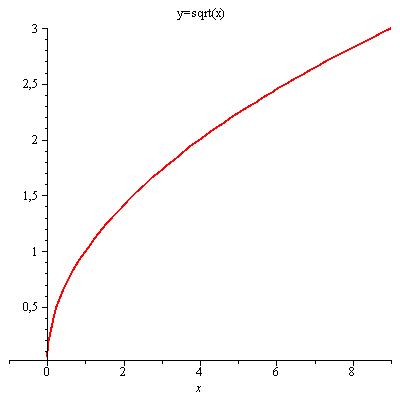
Jede Potenzfunktion mit geradem Exponent ist im Intervall
umkehrbar.
Die Umkehrfunktionen der auf das Intervall
beschränkten Funktionen heißen Wurzelfunktionen :
Beispiel 8 - 50:
sqrt()
liefert den Wert der Quadratwurzel. ’sqrt(4)’; ergibt 2.
Beispiel 8 - 51:
n-te Wurzel Gesucht ist die n-te Wurzel einer reellen Zahl:
.
Umgesetzt in den Maple-Befehl ’surd(x,n)’ erhält man das Ergebnis. Zahlenwerte:
.
’surd(27,3)’ liefert: 3
Beispiel 8 - 52:
solve bei Maxima / isolate bei Maple
unterstützt bei der Bildung von Umkehrfunktionen:
.
Maxima: solve(y=sqrt(x),x); .
0/7/2/1
8.2.2 Wurzelgleichungen
-
1.
- Wurzelgleichungen mit einer Wurzel:
Lösungsmethode: isolierung der Wurzel und Potenzieren
i.d.R. nicht äquivalente Umforungen, daher Lösungen ausprobieren.
Beispiel 8 - 53:
| | | | |
| | | | | |
| | | | | |
| | | | |
| | | | |
| | | | |
Probe:
| | | | | | |
| | | | | | | |
|
| |
.
Beispiel 8 - 50
Lösen Sie die Gleichung
.
ergibt 4, -1. .
-1 ist nicht zulässig. .
.
.
Weit. Beispiel:
.
Ist Null, wenn einer der Faktoren Null ist:
.
Weit. Beispiel:
.
.
.
.
.
-
2.
- Wurzelgleichungen mit zwei Wurzeln
Methode:
-
(a)
- Isolieren der Wurzel
-
(b)
- Quadrieren der Gleichung
-
(c)
- Isolieren der zweiten Wurzel
-
(d)
- Quadrieren (potenzieren) der Wurzel
Beispiel 8 - 51:
| | | |
| | | | |
| | | | Quadrieren |
| | | | |
| | | | |
| | | | Quadrieren |
| | | | |
| | | |
| | | |
| |
Probe:
| | | | | | |
| | | | | | | |
|
| |
0/7/3
8.3 Potenzfunktionen
0/7/3/0
8.3.1 Potenzfunktionen mit rationalem Exponenten
.
.
.
.
Beispiel 8 - 52:
Geladenes Teilchen im elektrischen Feld .
.
.
0/7/3/1
8.3.2 Potenzgleichungen
0/7/3/1/0
Lösungsmethode:
- Isolation
- geeignetes Potenzieren
0/7/3/1/1 .
Beispiel 8 - 51
.
| | | |
| | | | Zur 3. Potenz erheben |
| | | | |
| | | |
| |
| |
.
.
0/7/3/1/2
0/7/3/1/3 .
Beispiel 8 - 52
Einarbeitungszeit
Bei der Herstellung neuer Produkte nähert sich der Arbeitsaufwand nach einer Einarbeitungszeit
dem projektierten Arbeitsaufwand. Der Einarbeitungsprozess wird durch die allgemeine Funktion
beschrieben.
.
Arbeitsaufwand in
min/Stück, konkret:
.
Konstante/Parameter .
Stückzahl .
.
Angenommener projektiver Aufwand sei nun 18 min/Stück. .
Nach welcher Stückzahl ist dieser Aufwand erreicht bzw. unterschritten? .
.
. .
.
.
.
0/7/3/1/4
0/8
9 Exponentialfunktionen
0/8/0
0/8/1
9.1 Grundbegriffe, Rechenregeln
0/8/1/0
9.1.1 Einleitung
Verallgemeinerung des Begriffs Potenz .
:
bezeichnet man
als Basis und
als Potenz bzw. Exponenten .
Rechenregeln für Exponenten : .
-
-
.
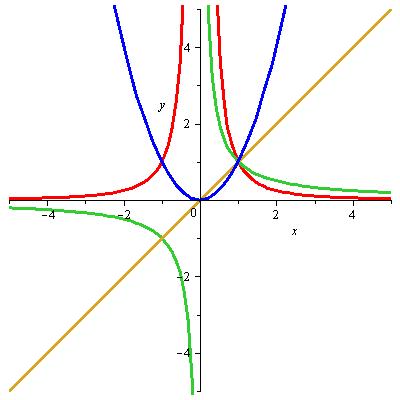
Funktionen vom Typ
mit
heißen Exponentialfunktionen . .
.
Tipp: Mit maple können Sie solche Terme über den Befehl combine zusammenfassen. .
| | | |
|
|
| | | |
|
|
| | | |
|
|
| | Monotonie | streng monoton fallend | streng monoton wachsend |
|
|
| | Asymptote | (für ) | (für ) |
.
.
.
.
0/8/2
9.2 Spezielle Anwendungen
0/8/2/0
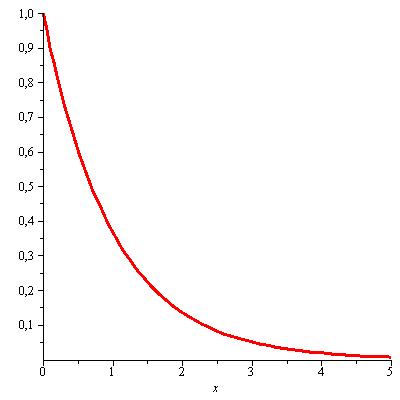
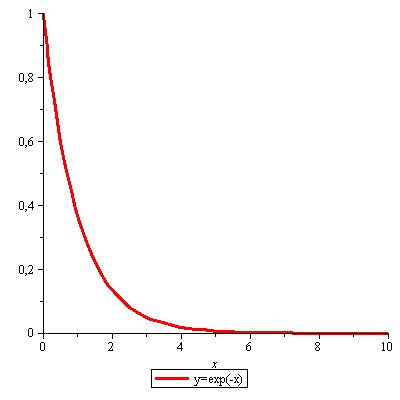
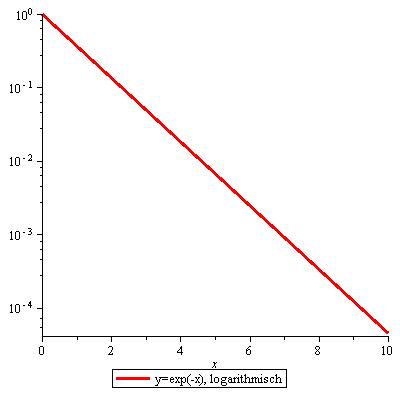
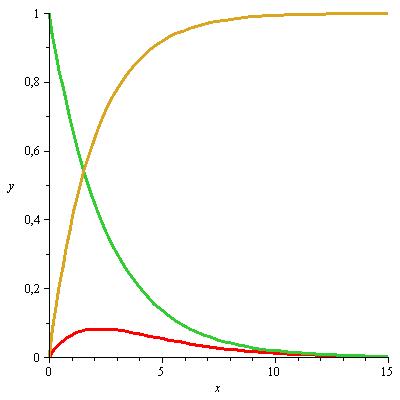
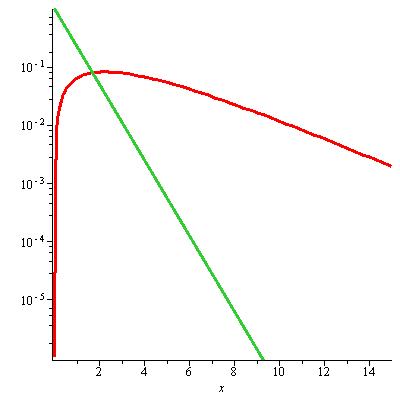
9.2.1 Abklingfunktion
0/8/2/0/0
.
.
0/8/2/0/1
0/8/2/0/2 (Bei elektrischen Schaltungen mit Kondensatoren
, Widerstand
ist
.) .
0/8/2/0/3 .
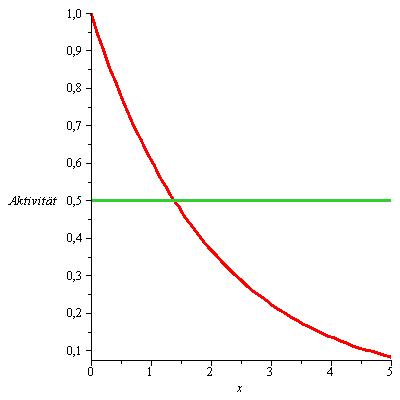
Beispiel 9 - 53
Radioaktiver Zerfall
.
.
Halbwertszeit:
. .
.
.
Tellur
ca. (7
Quadrillionen) Jahre .
Strontium 28,64 Jahre .
Cobalt
5,3 Jahre .
Die Anzahl der Zerfälle eines Stoffes wird in Bequerel, Bq (1/s) angegeben. .
Die Einheit für die effektive Dosis (z.B. für beruflich strahlenexponierte Personen) ist Sievert bzw.
Millisievert (mSv). .
Der Grenzwert der effektiven Dosis für beruflich strahlenexponierte Personen beträgt in
allen europäischen Ländern 20 mSv pro Kalenderjahr (in den USA 50 mSv/Jahr). .
Der Dosiskonversionsfaktor dient zur Umrechnung von Bq nach Sv: .
2.8 *
10-8 Sv/Bq 28,6 Jahre. .
(Das heißt, radioaktiv zerfallendes ,
das mit einer Aktivität von
strahlt, unterschreitet in den USA bereits heute die Grenzwerte, bei uns erst in ca. 29 Jahren.) .
.
0/8/2/0/4
0/8/2/1
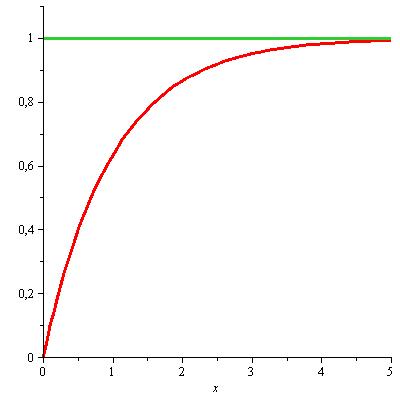
9.2.2 Sättigungsfunktion
0/8/2/1/0
0/8/2/1/1
0/8/2/2
9.2.3 Aperiodische Schwingungsvorgänge
0/8/2/2/0
Wird die Dämpfung (Reibung) an einem schwingungsfähigen Gebilde so groß, daß es nicht mehr in
der Lage ist zu schwingen, sondern sich asymptotisch einer Gleichgewichtsbedingung nähert, spricht
man von einem Kriechfall .
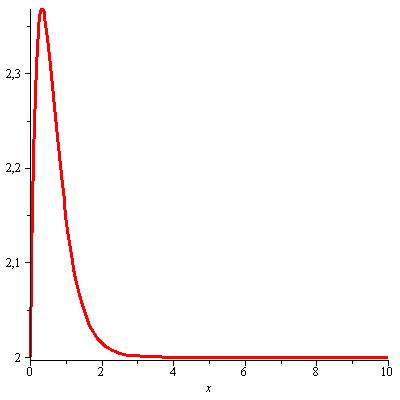
Der Übergang wird als aperiodischer Grenzfall bezeichnet und kann dargestellt werden als: .
(mit
). .
Beispiel 9 - 54:
Aperiodische Schwingung mit
0/8/2/2/1
0/8/2/2/2
0/8/2/3
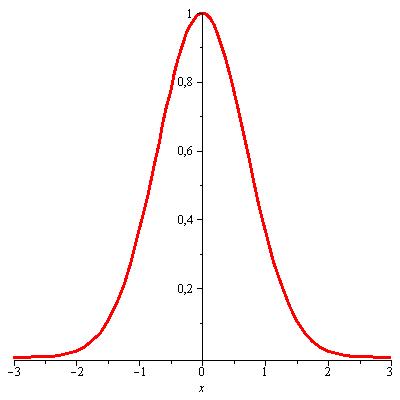
9.2.4 Gauß-Funktionen
0/8/2/3/0
Die Gauß-Funktion ist von der Form ,
.
allgemein: .
.
0/8/2/3/1
0/8/2/3/2 .
Häufig wird die Gauß-Funktion bei statistischen Betrachtungen eingesetzt. Die Verteilungsdichte
wird beschrieben als: .
.
. .
.
Bei dieser Schreibweise lassen sich einige Kenngrößen gut angeben: .
Die Standardabweichung
beschreibt die Breite der Normalverteilung und hängt mit der Halbwertsbreite zusammen.
Berücksichtigt man die tabellierten Werte der Verteilungsfunktion, gilt näherungsweise folgende
Aussage: .
- 68,27 % aller Messwerte haben eine Abweichung von höchstens
vom Mittelwert,
- 95,45 % aller Messwerte haben eine Abweichung von höchstens
vom Mittelwert,
- 99,73 % aller Messwerte haben eine Abweichung von höchstens
vom Mittelwert.
0/9
10 Logarithmusfunktionen
0/9/0
0/9/1
10.1 Grundbegriffe, Rechenregeln
0/9/1/0
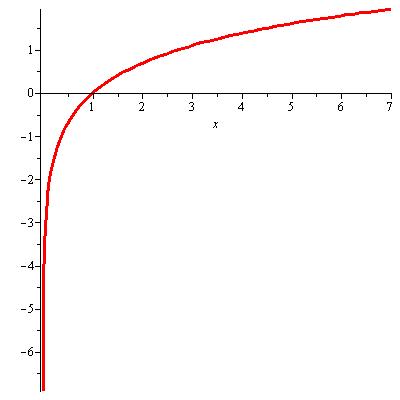
10.1.1 Die Logarithmusfunktion als Umkehrfunktion
0/9/1/0/0
.
.
.
0/9/1/0/1
0/9/1/0/2 .
.
Rechenregeln für Logarithmusfunktionen : .
.
.
.
.
.
spezielle Logarithmen: .
(natürlicher Logarithmus, Logarithmus naturalis) .
(Zehnerlogarithmus, dekadischer Logarithmus) .
.
.
(binärer Logarithmus) .
0/9/1/1
10.1.2 Basiswechsel von Logarithmen
0/9/1/1/0 .
Beispiel 10 - 54
Sie sollen mit dem Taschenrechner berechnen: ,
Ihr Taschenrechner kann aber nur natürliche Logarithmen
()
bestimmen. Sie können wie folgt vorgehen: .
,
logarithmieren: .
oder .
.
. .
Allgemein führt dies zur Frage des Basiswechsels: .
Gegeben sei ein Logarithmus
mit
mit irgendeinem Wert. .
Dieser Logarithmus soll in einen Term r umgewandelt werden, in dem später nur noch Logarithmen
der Basis d (d steht für destination, frei wählbar und größer Nulls s für source, frei wählbar und
größer Null) vorkommen sollen: .
.
.
Definition des Logarithmus anwenden:
.
Zur Basis s logarithmieren: .
.
, nach
r auflösen: .
. .
Mit der Definition (s.o).
wird daraus: .
. .
Hat man den Logarithmus von c zur Basis s, so kann man ihn umrechnen zur Basis d,
indem man durch den Logarithmus von d zur Basis s dividiert: .
. .
.
0/9/1/1/1
0/9/1/1/2 .
Beispiel 10 - 55
Gegeben sei
und .
Wie groß ist
.
. .
.
.
.
.
0/9/1/1/3
0/9/2
10.2 Transzendente Gleichungen
0/9/2/0
10.2.1 Definition
Transzendente Gleichungen sind Gleichungen, die mindestens einen nicht-algebraischen Ausdruck enthalten,
wie etwa
oder .
0/9/2/1
10.2.2 Exponentialgleichungen
0/9/2/1/0
Exponentialgleichungen enthalten Exponentialausdrücke.
Gelingt es, den Exponentialausdruck zu isolieren, kann man durch anschließendes Logarithmieren
beider Seiten den Exponentialausdruck umformen (Logarithmenregeln beachten !!). Sofern im
Logarithmus auf der anderen Seite die unabhängige Variable herausgelöst werden kann, ist die
Gleichung relativ einfach lösbar. .
0/9/2/1/1 .
Beispiel 10 - 56
.
| Logarithmieren |
umformen .
.
. .
.
0/9/2/1/2 .
0/9/2/1/3 .
Beispiel 10 - 57
.
Man sollte erkennen, daß die beiden Exponentialformen ineninander überführbar
sind: . .
Ensprechend kann man substituieren:
. .
.
.
,
.
Rücksubstitution: . .
.
.
0/9/2/1/4 .
0/9/2/2
10.2.3 Logarithmusgleichungen
-
1.
- Logarithmusgleichungen mit einem Logarithmus
Lösungsmethode: man erxponentiert beige Seiten der Gleichung (Regeln beachten
!)
Beispiel 10 - 58:
.
Definitionsbereich:
.
Exponentieren:
.
.
.
.
Beispiel 10 - 58
.
.
.
-
2.
- Gleichungen mit zwei Logarithmen
0/9/2/3 .
Beispiel 10 - 59
.
Definitionsbereich:
.
.
.
.
.
.
Weiteres Beispiel: .
.
Definitionsbereich:
.
Exponentieren .
.
.
, da
.
.
0/9/2/4 .
Beispiel 10 - 60
Lösen Sie die Gleichung .
.
Die Logarithmen haben alle die gleiche Basis (anderenfalls Basistransformation). .
Vorfaktoren in den Exponenten bringen: . .
positive und negative Summanden gruppieren: . .
Zusammenfassen : . .
.
.
Auflösen nach x: . .
.
.
0/9/2/5
0/9/2/6 .
Beispiel 10 - 61
Ein Container voller Gulaschsuppe wird auf einem LKW (Umgebungstemperatur
°C) zum Kunden transportiert
und habe zum Zeitpunkt
die Temperatur
°C.
Die Temperatur des Containers folgt dem Abkühlungsgesetz nach Newton: .
(k ist
eine Konstante). .
Nach zehn Minuten Fahrt ist der Container um 10 °C abgekühlt.
-
1.
- Wie groß ist die Konstante k ?
-
2.
- Wie lange darf der Fahrer höchstens unterwegs sein, wenn in den Lieferbedingungen
vereinbart wurde, dass die Temperatur des Containers mindestens 75 °C ist ? y-Skala
(logplot() ).
Lösung :
-
1.
-
-
2.
.
0/9/2/7 0/9/2/8
10.2.4 Übungen
Bitte bearbeiten Sie die Übungen hier .
0/10
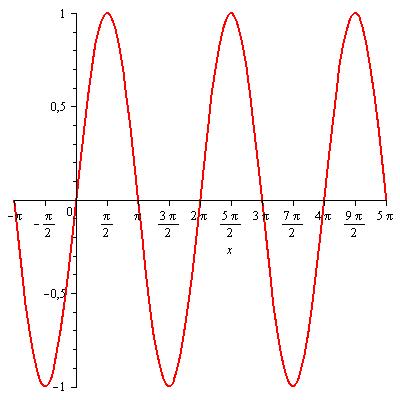
11 Periodische Funktionen
0/10/0
Trigonometrische Funktionen sind periodische Funktionen. .
0/10/1
11.1 Trigonometrische Funktionen
0/10/1/0
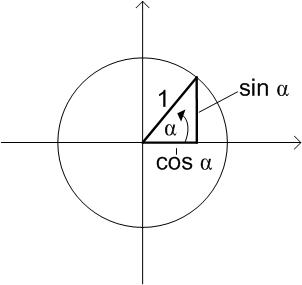
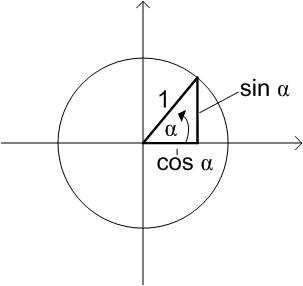
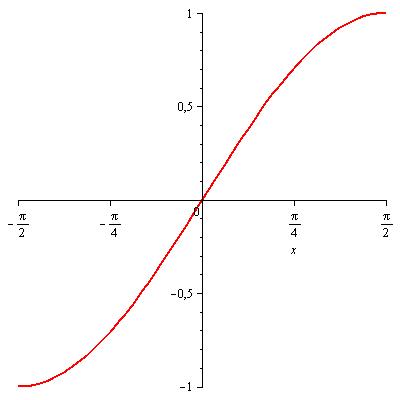
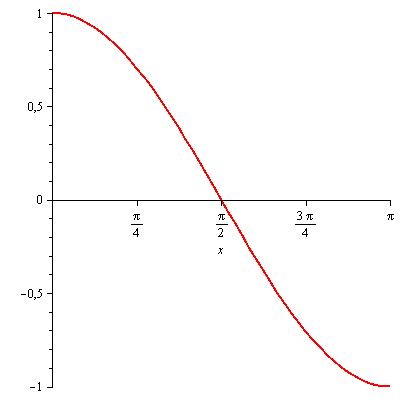
11.1.1 - und
-Funktion
0/10/1/0/0
0/10/1/0/1
.
.
.
.
.
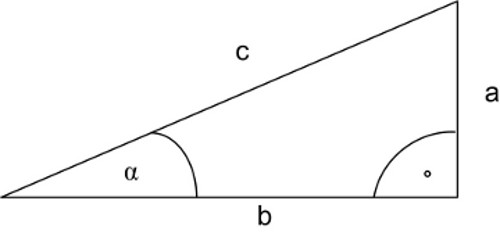
Sinussatz bei allgemeinen ebenen Dreiecken: .
.
Kosinussatz bei allgemeinen ebenen Dreiecken: .
.
.
.
Achtung bei Bogenmaß !!! .
.
0/10/1/0/2
0/10/1/0/3 .
.
Merkhilfe: .
.
| | | | | |
|
|
|
|
|
| | | | | | | |
| | | | | |
| | | | | |
| |
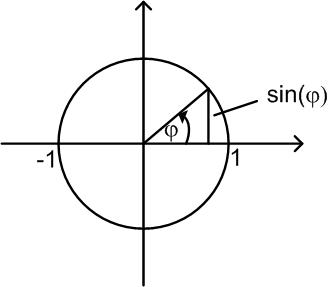
Drehsinn von :
Gegen den Uhrzeigersinn 0/10/1/0/4
0/10/1/0/5
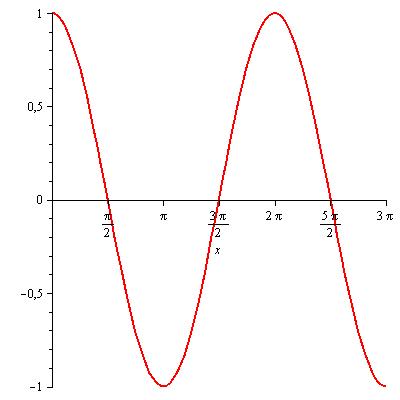
.
| | | | |
|
|
|
| | | | |
| | | |
| Periode | | | | | Symmetrie | ungerade | | gerade |
| Nullstellen | | | |
| relative Min. | | | |
| relative Max. | | | |
| |
.
.
.
0/10/1/1
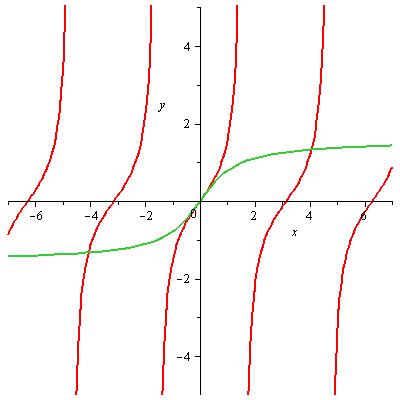
11.1.2 - und
-Funktion
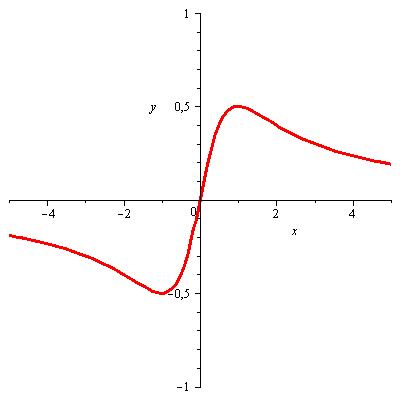
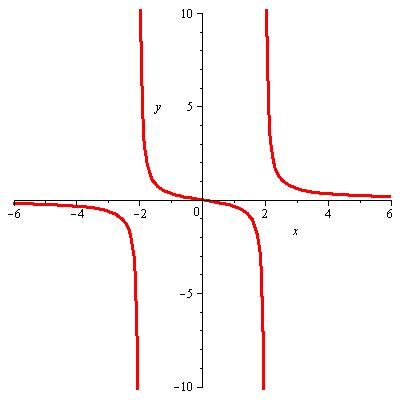
.
| | | | |
|
|
|
| | | | |
| | | |
| Periode | | | |
| Symmetrie | ungerade | | ungerade |
| Nullstellen | | | |
| Pole | | | |
| |
.
.
.
0/10/1/2
11.1.3 Wichtige Beziehungen
0/10/1/2/0
.
| | |
| | |
| | |
| | |
| | |
| | |
| | |
| | |
| |
.
0/10/1/2/1
0/10/1/2/2
.
Additionstheoreme
.
| | |
| | |
| | |
| Beispiel 11 - 62: |
| | |
| | |
| | |
| | | |
| | | |
| |
.
ebenso: .
.
.
0/10/2
11.2 Anwendungen in der Schwingungslehre
0/10/2/0
0/10/2/1
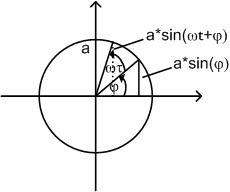
11.2.1 Harmonische Schwingungen
0/10/2/1/0
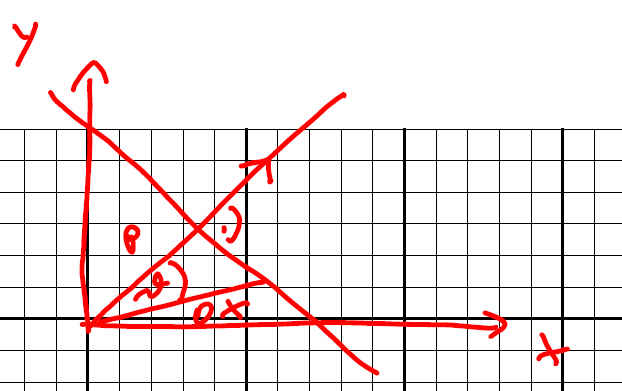
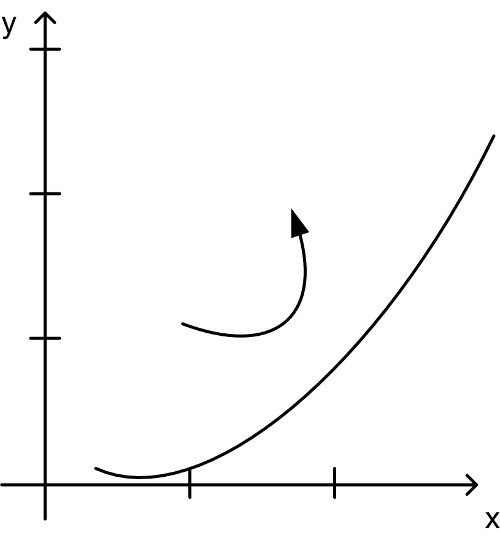
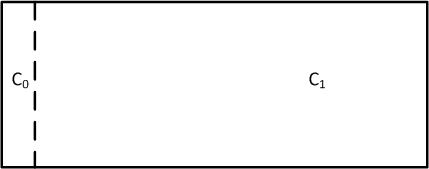
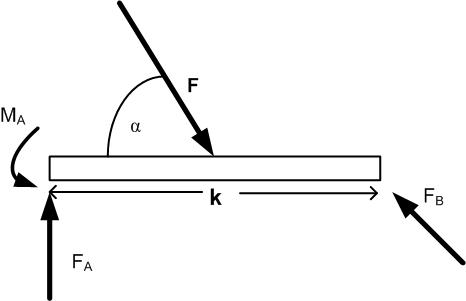
| (siehe Bild) | | a - | Amplitude |
| | | b - | Veränderung der Periode |
| | | c - | Verschiebung entlang der -Achse |
| |
0/10/2/1/1
0/10/2/1/2 .
(Die Cosinusfunktion ist analog zur Sinusfunktion, da
)
0/10/2/2
11.2.2 Anwendungen in der Mechanik
0/10/2/2/0
.
Masse-Feder-Pendel .
.
.
| : | max. Ausdehnung, Amplitude |
| : | Kreisfrequenz |
| : | Phase |
| : | Frequenz |
| : | Schwingungsdauer |
| |
.
0/10/2/2/1 .
Beispiel 11 - 62
| | |
| |
.
| Frequenz | : | |
| Amplitude | : | |
| Phase | : | |
| | | |
| |
.
0/10/2/2/2
0/10/2/3
11.2.3 Zeigerdiagramme
0/10/2/3/0
0/10/2/3/1
0/10/2/3/2 .
Beispiel 11 - 63:
| | |
| | | |
| | | |
| |
0/10/2/3/3
0/10/2/3/4 .
0/10/2/4
11.2.4 Überlagerung gleichfrequenter Schwingungen (Superposition)
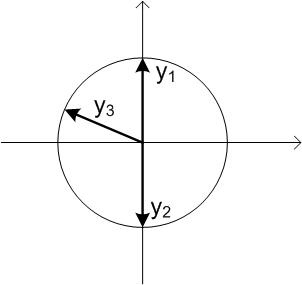
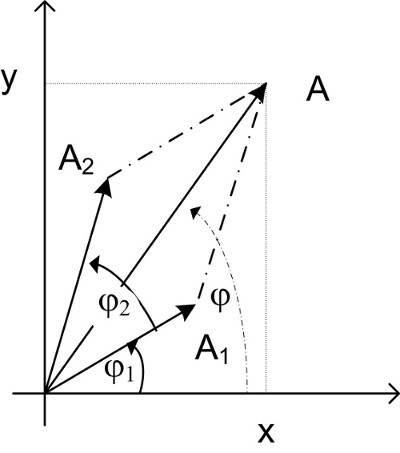
0/10/2/4/0
Zwei Schwingungen mit gleicher Frequenz, aber ggf. unterschiedlicher Amplitude und Phase können als eine
Schwingung
zusammengefasst werden: .
| | |
| | | |
| |
0/10/2/4/1
0/10/2/4/2 .
0/10/2/4/3 .
Beispiel 11 - 63
| | | |
| zur Vereinfachung: | | |
| | | |
| | | |
| | | |
| | | |
| | |
| |
.
| | |
| | | |
| | | |
| | + | |
| | |
| | | |
| | |
| | | |
| |
| | | |
| |
.
0/10/2/4/4
0/10/2/4/5 .
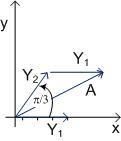
Beispiel 11 - 64
Stellen Sie die Harmonischen Schwingungen
und
durch eine
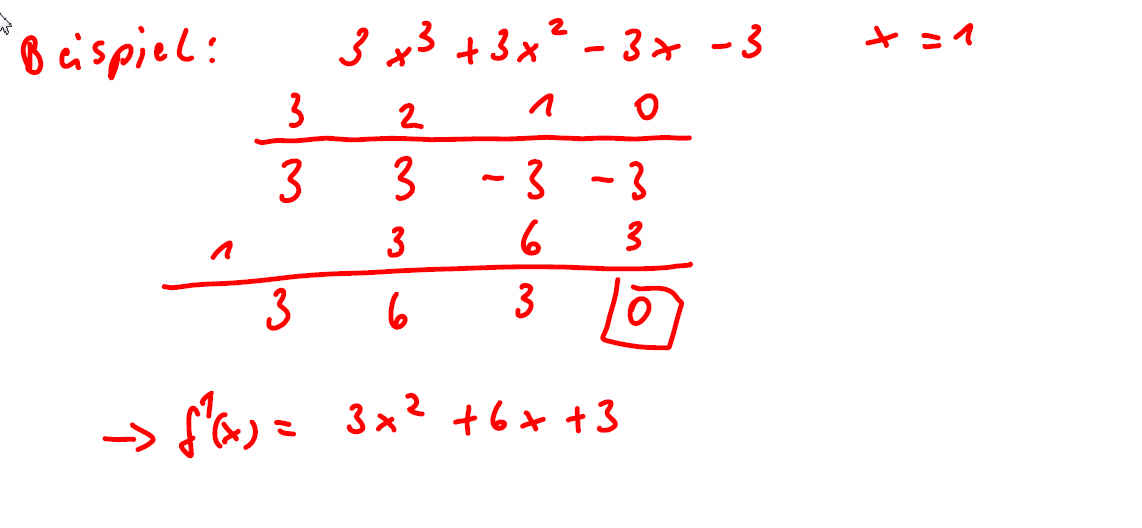
Sinusfunktion vom Typ
dar. .
.
.
.
und ,
,
mit
. .
.
. .
.
0/10/2/4/6 Anwendung: 0/10/2/4/7
0/10/2/4/8 .
0/10/2/4/9 .
Beispiel 11 - 65
| | |
| | | |
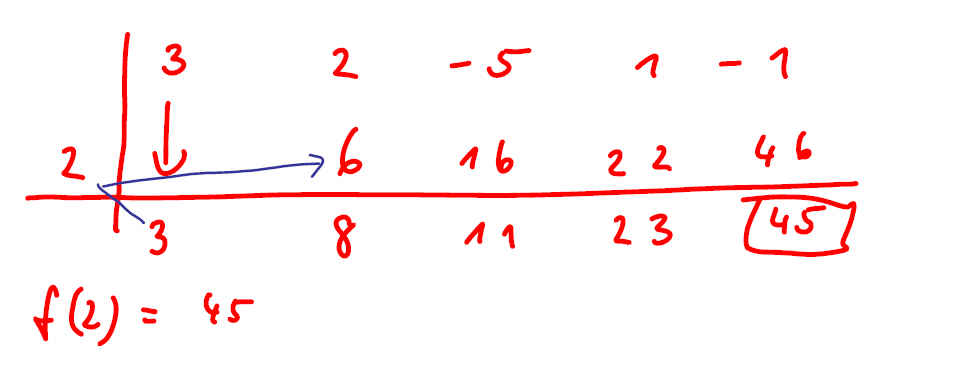
| |
.
| | |
| | | |
| | | |
| | | |
| | | | | |
| | | | | | | |
| | | | | | | |
| |
.
0/10/2/4/10
0/10/2/5
11.2.5 Lissajous-Figuren
0/10/2/5/0
| | | | | | | | | |
| | | | |
| | | | |
| | | |
| |
0/10/2/5/1
0/10/2/5/2 .
.
Beispiel 11 - 66:
Befehle zum Zeichnen von Lissajous-Figuren: .
Maple:
.
Maxima:
0/10/3
11.3 Arkus-Funktionen
0/10/3/0
11.3.1 Umkehrung trigonometrischer Funktionen
0/10/3/0/0
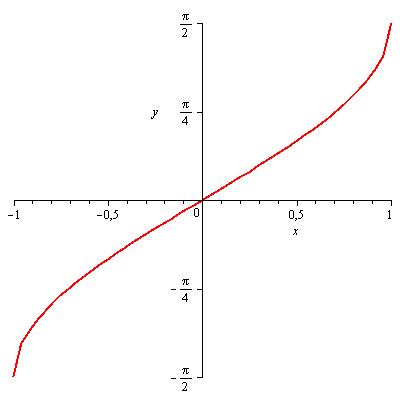
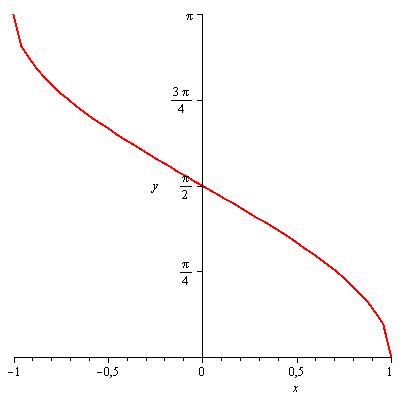
Die Arkus-Funktionen stellen die Umkehrung trigonometrischer Funktionen dar.
0/10/3/0/1
0/10/3/0/2 .
Von periodischen Funktionen kann nur dann eine Umkehrfunktion gebildet werden, wenn man sich auf
einen Teilbereich, den Hauptzweig beschränkt.
0/10/3/1
11.3.2 Arkussinusfunktion
0/10/3/2
11.3.3 Arkuscosinusfunktion
0/10/3/3
11.3.4 Arkustangensfunktion
0/10/3/3/0
0/10/3/3/1
0/10/3/3/2 Zeichnen .
mit Maple:
.
.
mit Maxima: ;
0/10/3/4
11.3.5 Trigonometrische (goniometrische) Gleichungen
0/10/3/4/0
Trigonometrische (goniometrische) Gleichungen
- haben i.d.R. unendlich viele Lösungen
- Vereinfachungen kann man u.U. über trigonometrische Beziehungen und Faktorisierung
erzielen
0/10/3/4/1 .
Beispiel 11 - 66
Bestimmen Sie die Lösungen der Gleichung .
.
.
| | |
| | | |
| | | |
| |
.
Lösungen ergeben sich, wenn einer der Faktoren Null ist.
-
1.
-
2.
.
.
0/10/3/4/2 .
Beispiel 11 - 67
Bestimmen Sie die Lösungen der Gleichung .
.
.
| | |
| | | |
| | | |
| | | |
| | | |
| | | |
| |
. ,
. .
.
.
0/10/3/4/3 .
0/10/3/5
11.3.6 Übungen
Bitte bearbeiten Sie die Übungen hier .
0/11
12 Hyperbel- und Areafunktionen
0/11/0
0/11/1
12.1 Hyperbelfunktionen
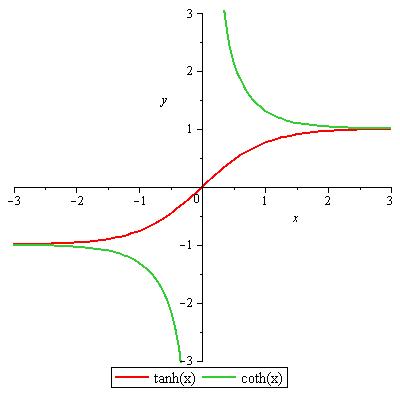
0/11/1/0
12.1.1 Hyperbelsinus und - cosinus
0/11/1/0/0
Die Begriffe Hyperbelfunktion , Hyperbelsinus sowie Hyperbelcosinus leiten sich aus der
Beziehung .
ab, die
ähnlich zu .
ist. .
0/11/1/0/1 .
Beispiel 12 - 68
.
.
.
.
.
.
.
0/11/1/0/2
.
.
.
.
.
Additionstheoreme : .
| | |
| | | |
| | | |
| |
| | |
| | | |
| | | |
| | | |
| | | |
| |
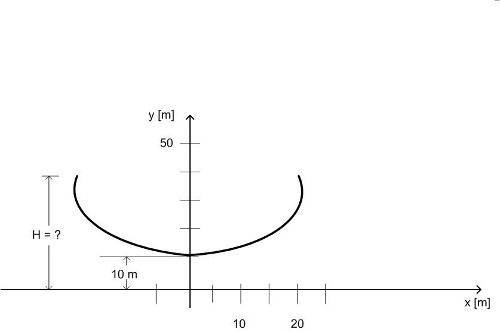
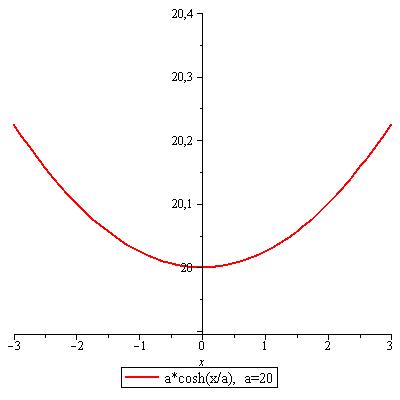
Technische Anwendung: Die Kettenlinie .
0/11/1/0/3 .
Beispiel 12 - 69
Kettenlinien werden durch eine Funktion
beschrieben. .
Zwei Masten sind 40 m voneinander entfernt. Eine Leitung (=’Kette’) zwischen diesen zwei
Befestigungen hat in der Mitte einen Abstand von 10 m zum Erdboden. Wie hoch sind die Masten ?. .
.
.
Herleitung (für Interessierte): Die Masse eines kleinen Teilstücks der Länge
, das in
x- und y-Richtung (mit noch unbekannten Beträgen) ausgedehnt ist, beträgt nach Phytagoras (mit
als
Gewicht pro Länge): . . .
Differentiell ausgedrückt: . . .
Die (feste, aber noch unbekannte) Länge erhält man über . .
Die Energie pro Teilstückchen
ist . .
Damit wird für die Gesamtenergie . , die es
zu minimieren gilt. Hierzu subtrahiert man auf beiden Seiten einen Wert für eine Länge
: .
. .
Für diese Energie sucht man nun ein Minimum, was folgende Gleichung ergibt: . . .
Diese (Differential-) gleichungen werden gelöst durch folgende Funktion: . . .
ist
der Krümmungsradius am Scheitelpunkt und gleichzeitig der Vergrößerungsfaktor. .
Im symmetrischen Fall (gleich hohe Aufhängepunkte) lautet die Gleichung
.
Durch geeignete Wahl der Ausgangsbedingungen kann man
eliminieren. .
zur Aufgabe: .
1. Scheitelpunkt mit
.
2. Aufhängepunkte : .
.
0/11/1/0/4 .
0/11/1/0/5
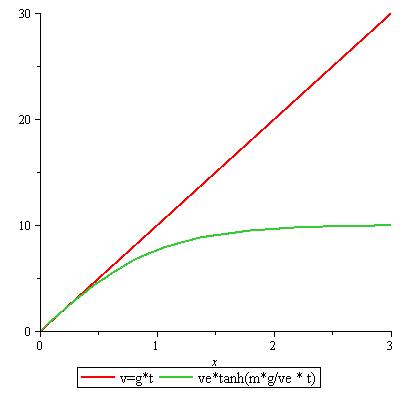
0/11/1/0/6 .
Beispiel 12 - 70:
Fall
mit Luftwiderstand .
| | | | Reibungskraft, mit const. |
| | | |
| | | |
| | | |
| |
.
0/11/1/0/7
0/11/1/0/8 .
0/11/1/1
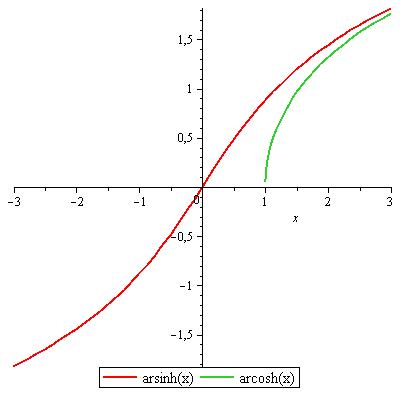
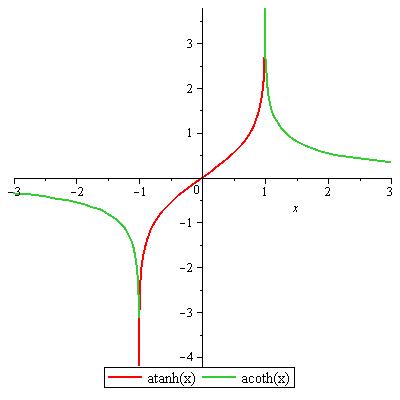
12.1.2 Areafunktionen
0/11/1/1/0
Die Areafunktion ist die Umkehrfunktion einer Hyperbelfunktion. .
| | | | |
| | | | | |
| | | | | |
| | | | | |
| |
.
0/11/1/1/1
0/11/1/1/2
0/11/1/1/3 .
Beispiel 12 - 70
Bitte vereinfachen Sie:
.
| | |
| | | | | |
| |
.
0/11/1/1/4 .
0/11/1/1/5 .
Beispiel 12 - 71
Bitte vereinfachen Sie:
.
| | | | |
| | | | | , da |
| |
.
0/11/1/1/6 .
0/11/1/1/7 .
Beispiel 12 - 72
Bilden Sie die Umkehrfunktion von
.
| ausmultiplizieren . |
| | . |
| | quadrat. Ergänzung: addieren und subtrahieren . |
| | isolieren, Wurzel . |
| | isolieren . |
| | logarithmieren . |
| | achtung mit minus ! . |
| |
.
0/11/1/1/8 .
0/11/1/1/9 .
Beispiel 12 - 73
Bilden Sie die Umkehrfunktion zu :
.
.
.
Variablentausch:
| | | |
| | | | |
| | | | |
| | | | |
| | | |
| |
.
0/11/1/1/10 .
0/12
13 Differentialrechnung
0/12/0
0/12/1
13.1 Differenzierbarkeit einer Funktion
0/12/1/0
0/12/1/1
13.1.1 Tangentenproblem
0/12/1/1/0
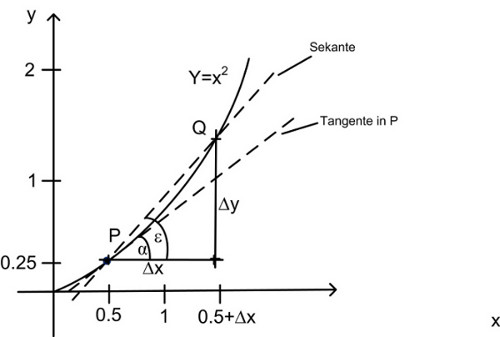
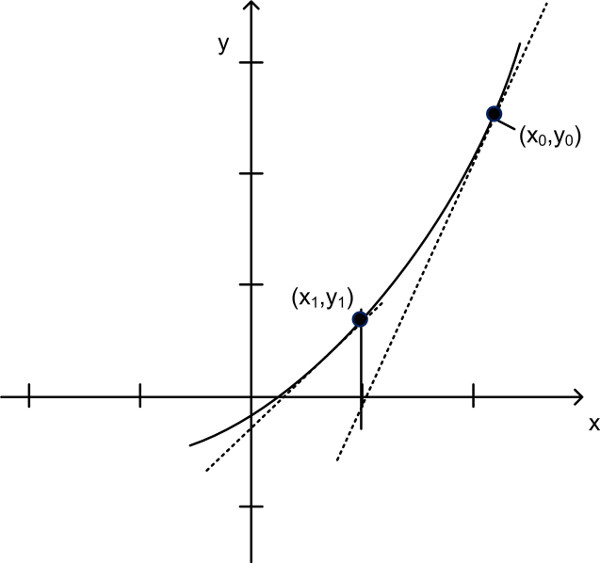
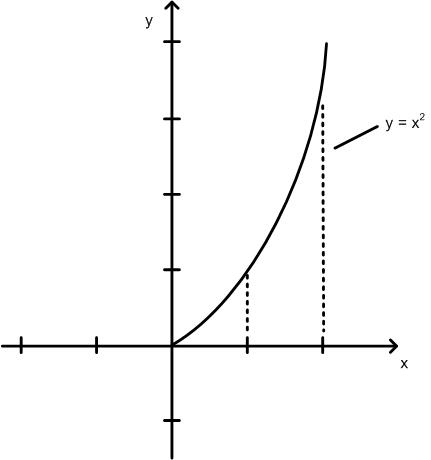
Beispiel: .
| | | | | | | | | : | Steigung |
| |
0/12/1/1/1
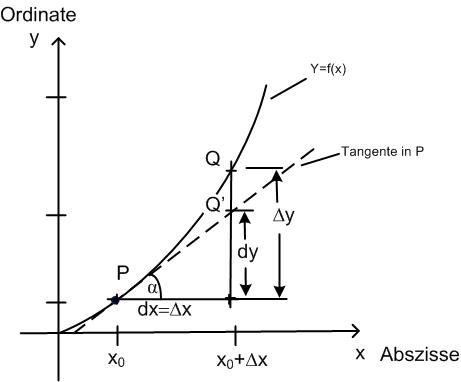
0/12/1/1/2 .
Gesucht ist zunächst die Steigung der Sekante
:
| | | | | |
| | | | | | |
| | | | | | |
| |
.
Für die Tangentensteigung gilt: .
| | | | | |
| | | | | | |
| |
.
.
Der Grenzwert existiert und ist links und rechts gleich. .
Funktion ist
an der Stelle
differenzierbar. .
Den angegebenen Grenzwert bezeichnet man als Ableitung : .
| | | | |
| |
.
Sie wird häufig wie folgt symbolisiert: .
| | | | |
| |
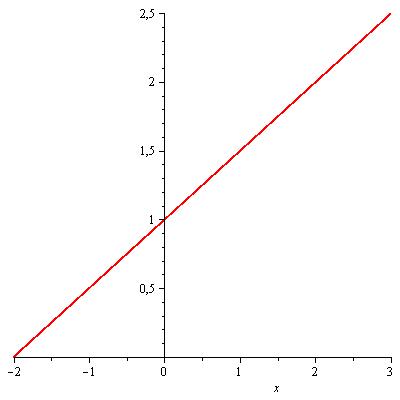
.
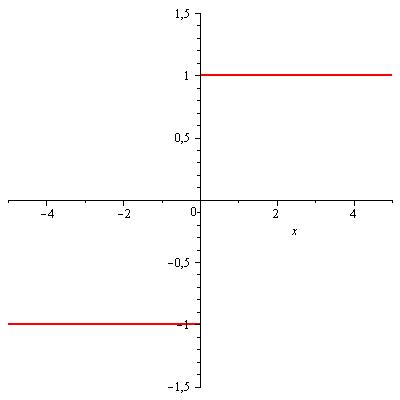
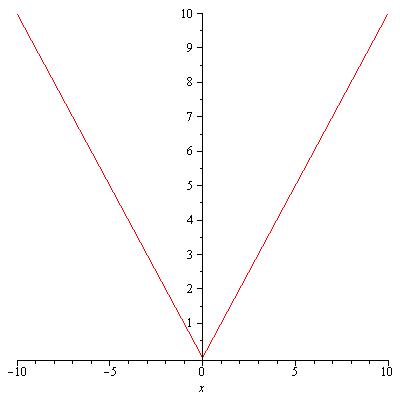
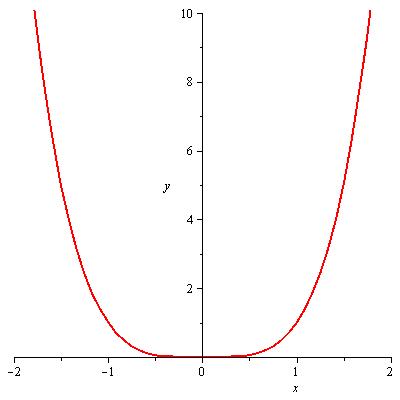
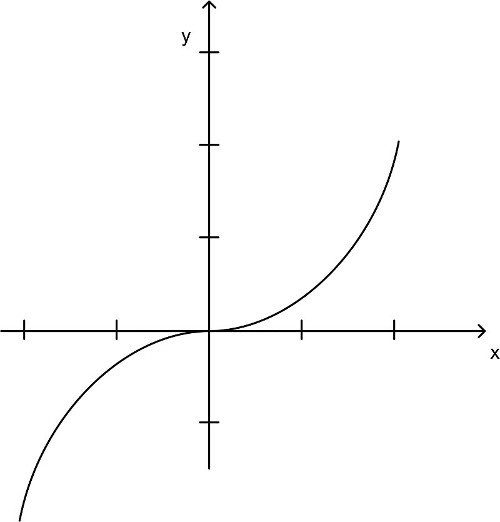
Differenzierbarkeit -auch innerhalb des Definitionsbereichs- ist nicht von vornherein gegeben;
Beispielsweise ist die Funktion .
| x für x ≥ 0
| | -x für x < 0 |
.
nicht überall ableitbar: An der Stelle x = 0 besitzt sie keine eindeutig bestimmte Tangente: .
0/12/1/1/3
0/12/1/1/4 .
Die Funktion
ist an der Stelle
nicht differenzierbar
0/12/1/2
13.1.2 Potenzregel
für
gilt: .
.
.
.
.
.
.
.
.
.
.
.
.
0/12/1/3
13.1.3 Ableitung elementarer Funktionen
|
|
| | Funktionsgruppe | Funktion | Ableitung |
|
|
| | Elementare Funktionen | | |
|
|
| | | | |
|
|
| | | | |
|
|
| | | | |
|
|
| | | | |
|
|
| | | | |
|
|
| | | | |
|
|
| | | | |
|
|
| | | | |
|
|
| | | | |
|
|
| | Exponentialfunktionen | | |
|
|
| | | | |
|
|
| | Logarithmusfunktionen | | |
|
|
| | | | |
|
|
| | |
|
|
| | Funktionsgruppe | Funktion | Ableitung |
|
|
| | Sinusfunktionen | | |
|
|
| | | | |
|
|
| | | | |
|
|
| | | | |
|
|
| | Arcusfunktionen | | |
|
|
| | | arccos x | |
|
|
| | | arctan x | |
|
|
| | | arccot x | |
|
|
| | Hyperbelfunktionen | sinh x | |
|
|
| | | cosh x | |
|
|
| | | tanh x | |
|
|
| | | coth x | |
|
|
| | Areafunktionen | arsinh x | |
|
|
| | | arcosh x | |
|
|
| | | artanh x | |
|
|
| | | arcoth x | |
|
|
| | |
0/12/2
13.2 Ableitungsregeln
0/12/2/0
0/12/2/1
13.2.1 Faktorregel
Die Ableitungsregeln können können wahlweise eingesetzt werden und schließen sich nicht
gegenseitig aus.
| | | | |
| | | | |
| | | |
| | | | | |
| |
.
.
Beispiel:
| | | | | | |
| | | | | | |
| |
.
0/12/2/2
13.2.2 Summenregel
| | |
| | |
| |
Beispiel 13 - 1:
.
| | | | |
| | | |
| | |
| | | | |
| | | | | |
| | |
| | | | |
| | | | | |
| |
0/12/2/3
13.2.3 Produktregel
0/12/2/3/0
| | |
| | |
| | |
| | |
| |
.
.
.
0/12/2/3/1 .
Beispiel 13 - 74
| Beispiel 1: | | | | |
| Beispiel 2: | | | | |
| Beispiel 3: | | | | |
| |
.
Beispiel 1: Beispiel 2: Beispiel 3:
0/12/2/3/2
0/12/2/4
13.2.4 Quotientenregel
| | | | |
| | | | |
| |
.
Beispiel 13 - 75:
| | | | | | |
| |
| | | |
| | |
| |
.
0/12/2/5
13.2.5 Kettenregel
0/12/2/5/0
Beispiel 13 - 76:
| | | | | | |
| |
| | | Innere Funktion |
| | | | Äußere Funktion |
| |
| | | | | | |
| | | | | |
| |
| | | | | | |
| | | | | | | |
| | | |
| | | |
| | | |
| |
.
.
| | | | |
| | | |
| | | |
| | |
| |
.
0/12/2/5/1 .
Beispiel 13 - 75
.
äußere Funktion: innere Funktion: | | |
| | | |
| | |
| | | | | | | |
| | |
| |
.
0/12/2/5/2 .
0/12/2/5/3 .
Beispiel 13 - 76
.
äußere Funktion: innere Funktion: | | |
| | | |
| | | | | | | |
| | |
| | | | | | | |
| | |
| |
.
0/12/2/5/4
0/12/2/5/5 .
Beispiel 13 - 77
.
1. Substitution: 2. Substitution: | | | | | | | |
| | | | | |
| | | | | |
| | | | | |
| | |
| | | | | |
| | | | | |
| | |
| |
. . Weiteres Beispiel:
.
0/12/2/5/6 .
0/12/2/6
13.2.6 Logarithmische Ableitung
0/12/2/6/0
Vorgehensweise :
-
1.
- Logarithmieren beider Seiten
-
2.
- Ableiten (z. B. mit Hilfe der Kettenregel)
Beispiel 13 - 78:
| | | | | Logarithmieren beider Seiten |
| | | |
| | | | | |
| | |
| | | |
| | | |
| | |
| | | | | |
| | | | | |
| | |
| | | | | |
| |
.
0/12/2/6/1 .
Beispiel 13 - 78
.
| | |
| | | |
| | | | äußere Funktion |
| | | | innere Funktion |
| | |
| | | |
| | | |
| | | |
| | | |
| | |
| |
.
0/12/2/6/2 .
Beispiel 13 - 79
.
.
(Produktregel) | | |
| | | | | |
| | |
| | | |
| | | |
| | | | | |
| | | | | |
| |
.
0/12/2/6/3
0/12/2/7
13.2.7 Ableitung der Umkehrfunktion
0/12/2/7/0
Gegeben sei eine Funktion ,
von der die Ableitung
sowie die Umkehrfunktion
gebildet werden kann. .
Falls die Ableitung der Umkehrfunktion
nun nicht mit den bisherigen Verfahren gebildet werden kann, läßt sich die Umkehrfunktion
evtl.
doch ableiten:
0/12/2/7/1
0/12/2/7/2 .
Das Prinzip: .
Funktionsgleichung nach x auflösen:
Anders ausgedrückt:
| innere Funkion | | | | |
| äußere Funkion | | |
| Kettenregel: | | | | |
| | | | |
| | | | | |
| |
.
.
Die Schritte zur Ableitung der Umkehrfunktion
-
1.
- Ersetzen der Variablen
durch
und ableiten
-
2.
- Auf beiden Seiten
und
vertauschen
Beispiel 13 - 80:
Gegeben sei die Umkehrfunktion von :
.
sowie die Ableitung von :
. .
Gesucht ist die Ableitung :
.
Schritt 1: .
.
.
Schritt 2: Vertauschen von
und :
.
.
0/12/2/7/3 .
Beispiel 13 - 80
.
| | | | |
| | | |
| | | | | | | |
| | | | | |
| |
.
0/12/2/7/4
0/12/2/8
13.2.8 Implizite Ableitung
0/12/2/8/0
Ist eine Gleichung in impliziter Darstellung
gegeben, läßt sich die Ableitung bilden, indem man alle Terme ableitet (Kettenregel beachten !) .
0/12/2/8/1 .
Beispiel 13 - 81
Zu bilden sei die Ableitung der Funktion
.
. . Auflösen nach :
. .
. .
.
0/12/2/8/2
0/12/2/9
13.2.9 Differential einer Funktion
0/12/2/9/0
0/12/2/9/1
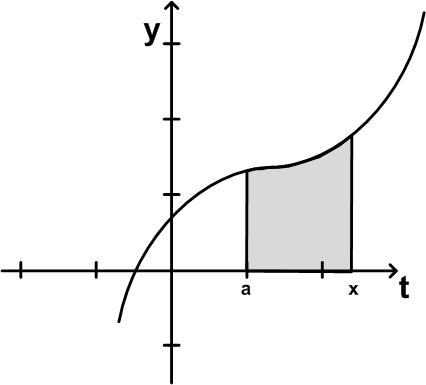
0/12/2/9/2 .
Fragestellung: Wie groß wird der Fehler, wenn anstelle der Tangentensteigung die Sekantensteigung für
ein
(z.B. von 0.1) verwendet wird ? .
.
Differential
.
Zuwachs der Ordinate
der Kurventangente an
bei Änderung der Abszisse
um .
:
Ordinatenabweichung .
Die Ableitung einer Funktion kann als Quotient zweier Differentiale aufgefasst werden.
Beispiel 13 - 82:
.
Gesucht ist Steigung der Sekante, also die Ordinatenänderung
für eine
Änderung von
an . .
.
| Für | | | in |
| Für | | |
| | | |
| | | |
| | | |
| |
Damit ist die Steigung der Sekante im Punkt
ungefähr .
.
Steigung der Kurventangente: .
| | |
| | | |
| |
.
Differenz der Steigungen:
.
Der relative Fehler ist
dann Steigungsdifferenz
/ Steigung
0/12/2/10
13.2.10 Höhere Ableitungen
0/12/2/10/0
-
1.
-
-
2.
-
-
3.
-
-
4.
-
-
5.
- n.
.
.
.
: Differentialqutient n-ter Ordnung
.
Beispiel 13 - 83:
.
.
0/12/2/10/1 .
Beispiel 13 - 82
.
| | |
| | | |
| | | |
| | | |
| |
.
0/12/2/10/2
0/12/2/11
13.2.11 Übungen
Bitte bearbeiten Sie die Übungen hier .
0/12/3
13.3 Anwendung der Differentialrechnung
0/12/3/0
0/12/3/1
13.3.1 Tangente und Normale
0/12/3/1/0
0/12/3/1/1
0/12/3/1/2 .
Tangentengleichung:
.
Steigung der Normalen:
.
Normalengleichung:
.
.
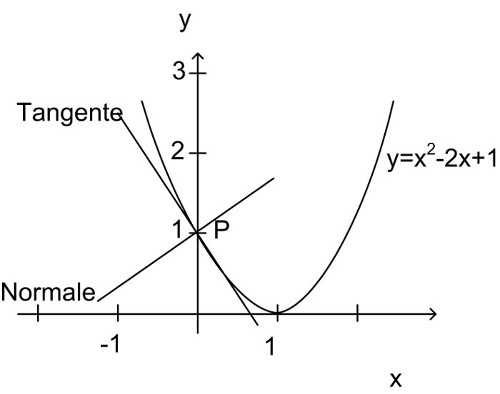
Beispiel 13 - 83:
.
.
gesucht: Gleichung der Tangente und Normale n am Schnittpunkt mit der
-Achse.
.
Schnittpunkt mit der -Achse:
.
.
Tangentensteigung:
.
.
Tangente:
.
.
Normale: .
.
.
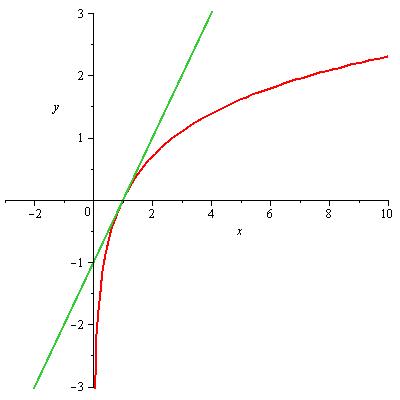
0/12/3/1/3 .
Beispiel 13 - 83
Zu ermitteln ist die Gleichung der Tangente, die vom Punkt
aus an den
Funktionsgraphen
gelegt wird.
.
-
1.
- Gerade durch
:
, da
und
-
2.
- Tangente für
-
3.
- gleichsetzen von 1. und 2.:
.
0/12/3/1/4
0/12/3/2
13.3.2 Charakteristische Kurvenpunkte, Monotonie
-
1.
- Monotonie
| Funktionskurve steigt streng monoton beim Durchgang durch |
| | Funktionskurve steigt monoton beim Durchgang durch |
| | Funktionskurve fällt streng monoton beim Durchgang durch |
| | Funktionskurve fällt monoton beim Durchgang durch |
| |
Beispiel 13 - 84:
.
.
| | |
| | | | |
| |
.
.
Beispiel 13 - 84
.
| | |
| | | | |
| |
Skizze !!! .
.
.
Beispiel 13 - 85
.
| | | |
| | | |
| | | | |
| |
.
-
2.
- 2. Ableitung, Krümmung
Krümmung
.
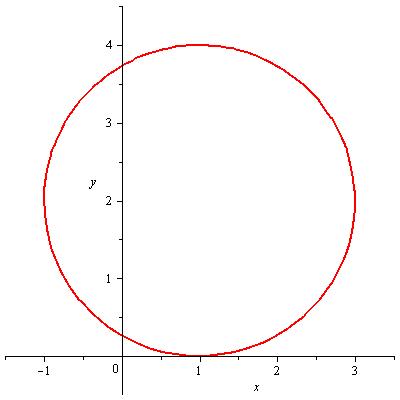
Beispiel 13 - 86
Kreisgleichung, obere Hälfte
.
| | | | |
| | | | | |
| | | |
| | | |
| | | |
| |
| |
| | | | | |
| | | | | |
| | | | | |
| |
.
Krümmung
(Kehrwert des Radius) .
.
Allgemein gilt: Krümmungsradius
0/12/3/3
13.3.3 Kurvendiskussion/relative Extremwerte
0/12/3/3/0
gegeben: stetige/ableitbare Funktion .
0/12/3/3/1
0/12/3/3/2 .
Extrema: Waagrechte Tangenten .
| relatives Maximum: | | |
| relatives Minimum: | | |
| |
.
.
Hinreichende Bedingung: verschiedenartige Monotoniebögen
Beispiel 13 - 87:
.
|
| | |
| | |
| | |
| |
0/12/3/3/3
0/12/3/3/4 .
kein Minimum, kein Maximum, sondern Wendepunkt .
Beispiel 13 - 88:
.
0/12/3/3/5
0/12/3/3/6 .
| |
| | |
| | |
| | |
| |
Extrema liegen
vor, wenn die 1.Ableitung Null ist und die erste höhere Ableitung, die von Null verschieden ist, von gerader
Ordnung ist.
.
| Maxima: | | für | und | gerade | | | |
| Minima: | | für | und | gerade |
| |
.
0/12/3/4
13.3.4 Wendepunkte, Sattelpunkte
0/12/3/4/0
0/12/3/4/1
0/12/3/4/2
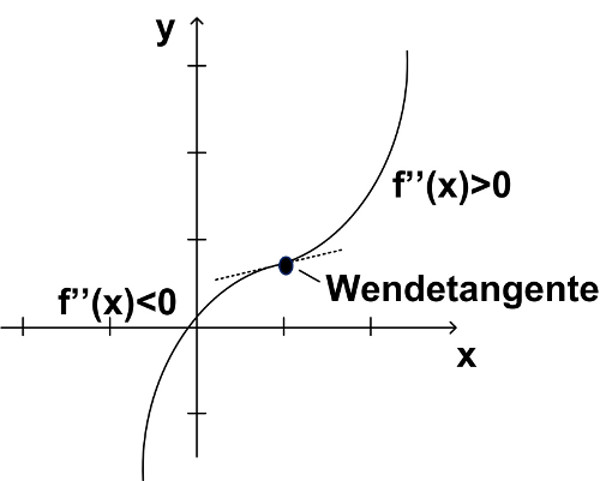
Ein Wendepunkt liegt vor, wenn
und die erste höhere von Null verschiedene Ableitung von ungerader Ordnung ist. .
| | und |
| | , wobei ungerade ist | |
| |
.
.
0/12/3/4/3 .
Beispiel 13 - 87
.
| |
| | |
| | |
| | |
| | |
| |
.
0/12/3/4/4 .
Die erste von Null verschiedene Ableitung ist ungerader Ordnung
Es
liegt ein Wendepunkt vor. .
0/12/3/4/5 .
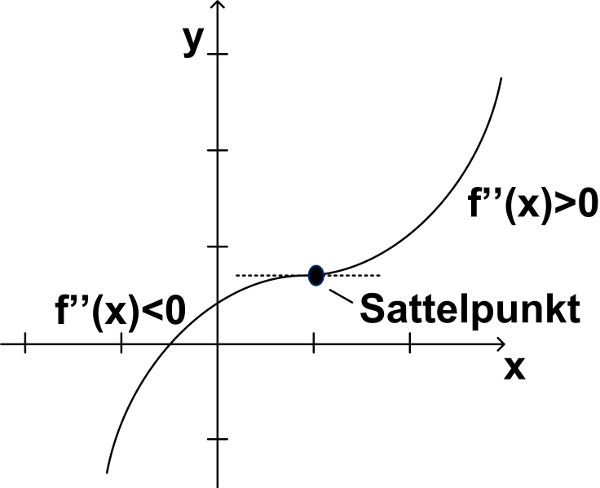
Beispiel 13 - 88
.
| | |
| | | |
| | | |
| | |
| | | |
| | | |
| | | |
| | | horizontale Tangente |
| |
| |
| | | Sattelpunkt |
| |
.
0/12/3/4/6 .
0/12/3/5
13.3.5 Kurvendiskussion
0/12/3/5/0
Folgende Merkmale werden bei einer Kurvendiskussion betrachtet: .
- efinitionsbereich/Definitionslücken
- Symmetrie
- Nullstellen
- Polstellen, senkrechte Asymptoten
- Ableitungen (i.d.R. )
- Extremwerte (Minima, Maxima)
- Wendepunkte
- Verhalten der Funktion für
(Asymptoten)
- ertebereich
- Zeichnung
0/12/3/5/1 .
Beispiel 13 - 89
-
- Symmetrie:
- Nullstellen
und
- Polstelle
- Ableitungen:
.
.
.
.
horizontale Tangente:
.
.
-
Minimum
Maximum
- Wendepunkte: .
.
.
.
- Asymptote: .
.
- Wertebereich .
.
.
.
0/12/3/5/2 .
0/12/3/5/3 .
Beispiel 13 - 90
-
- Symmetrie: .
.
.
- Nullstellen:
- Ableitungen: .
.
.
- Maximum / Minimum: .
.
- Wendepunkte:
- Asymptote für
- Zeichnung
.
-
- unecht gebrochenrationale Funktion
Polynomdivision
- Nullstellen:
doppelte Nullstelle
- Ableitungen:
-
Maximum
Minimum
- keine Wendepunkte
- Asymptote für
. .
- Zeichnung
. .
.
0/12/3/5/4
.
.
0/12/3/5/5 .
Beispiel 13 - 91
-
- Nullstelle:
- Polstelle:
- Ableitungen:
.
.
.
.
- Extremwerte:
- Wendepunkte:
.
.
- Zeichnung
.
.
-
- Nullstelle:
- Polstelle:
- Ableitungen:
.
- Extremwerte:
- Wendepunkte:
- Zeichnung
.
0/12/3/5/6 .
0/12/3/6
13.3.6 Linearisierung einer Funktion; Nullstellenbestimmung nach Newton
0/12/3/6/0
0/12/3/6/1
0/12/3/6/2 .
.
.
.
.
.
.
.
Wiederholung:
solange, bis Fehler
.
.
.
Konvergenzkriterien:
.
.
Beispiel: .
Startwert :
Konvergenzkriterium erfüllt? .
.
.
.
.
.
Konvergenzkriterium erfüllt .
|
|
|
|
| | | | |
|
|
|
|
| | | | |
| | | |
| | | .. | |
| |
0/12/3/7
13.3.7 Extremwertaufgaben
0/12/3/7/0
Extremwertaufgaben können u.U. helfen, Optima herauszufinden. .
gegeben: Zielfunktion .
gesucht: Minimum, Maximum. .
0/12/3/7/1 .
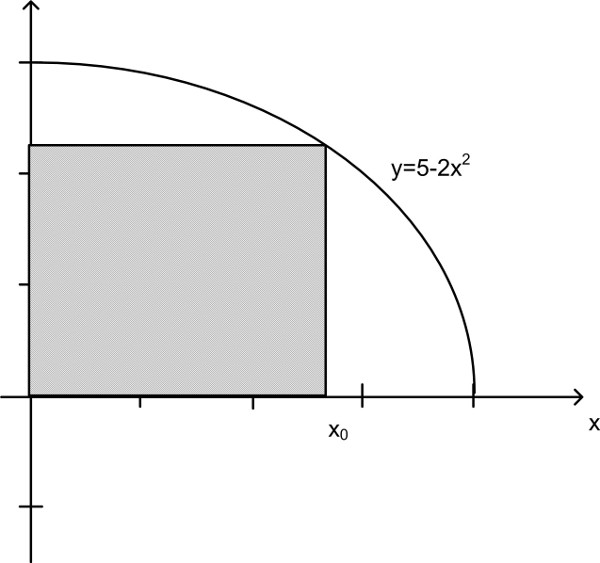
Beispiel 13 - 92
Gegeben sei die Funktion .
Ein Rechteck werde durch die x- und y-Achsen sowie einen Punkt der Funktion
begrenzt.
-
1.
- Zeigen Sie, daß es einen Punkt von
gibt, für den die Fläche des eingeschlossenen Rechtecks maximal wird.
-
2.
- Welchen Wert hat x ?
-
3.
- Wie groß ist die Fläche ?
Lösung :
-
1.
- ,
-
2.
-
.
,
nur
macht Sinn. .
,
also Maximum für .
-
3.
.
0/12/3/7/2
0/12/3/7/3 .
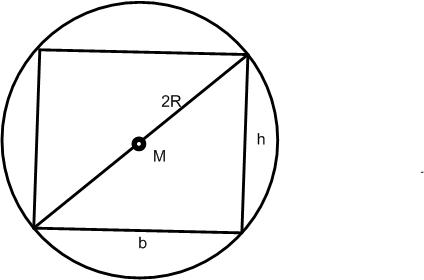
Beispiel 13 - 93
Aus einem Baumstamm mit kreisförmigem Querschnitt soll ein Balken mit
rechteckigem Querschnitt so herausgeschnitten werden, daß sein Widerstandsmoment
(Breite
b, Dicke h) möglichst groß wird. .
Wie groß ist h bzw .b ? .
Mit dem Durchmesser 2R gilt: .
.
.
Das Widerstandsmoment wird damit ausgedrückt: .
.
(für
0.
.
,
.
.
ergibt:
.
.
. .
.
(Der negative Wert scheidet aus). Maximum: .
.
.
. .
.
Das Ganze ließe sich auch durch die Balkendicke h ausdrücken, ist aber wesentlich aufwendiger: .
.
.
.
0/12/3/7/4
0/12/3/7/5 .
Beispiel 13 - 94
Gegeben ist eine Lampe mit der Lichtstärke .
In Punkt
gilt für die Helligkeit:
gesucht ist die maximale Ausleuchtung des Tischrandes.
Wie hoch muss die Lampe aufgehängt werden?
.
Lösungsweg: Drücke alle Terme in
aus!
d.h. ist
ein Maximum.
0/12/3/7/6
0/12/3/8
13.3.8 Ableitung einer in der Parameterform dargestellten Funktion (Kurve)
0/12/3/8/0
Sind die Koordinaten x und y durch einen Parameterausdruck gegeben, so wird nach diesem
Parameter abgeleitet. .
0/12/3/8/1 .
Beispiel 13 - 95
.
.
.
. . .
.
0/12/3/8/2
0/12/3/9
13.3.9 Diffusion, Arzneimittelverabreichung
0/12/3/9/0
Das Modell des pharmakokinetischen Grundversuchs [Langguth] ( Kompartiment-Modell )
ist vergleichbar mit dem Modell der Diffusion in der Physik. Es geht aus von Kompartimenten, d.h.
pharmakokinetisch einheitlichen Räumen. (In der Sprache der Physik sind dies homogenene
Bereiche.) .
Je größer der Konzentrationsunterschied ist, umsomehr versucht
, kleiner
zu werden. (Dies ist eine vereinfachende Modell-Annahme !) .
Beispiel: auf der linken Seite ist eine Konzentration
, rechts
ist
(hierhin ’verdünnt’ sich der Wirkstoff zunächst). 0/12/3/9/1
0/12/3/9/2 .
Dies kann man beschreiben durch .
Konzentrationsänderungsrate
Konzentrationsunterschied (k ist eine Konstante, die -versuchsabhängige- Diffusionskonstante) oder .
oder: .
Eine Lösung der (Differential-)Gleichung (s. Mathematik II)ist:
.
Zu Beginn ist ,
also die Dosis verteilt auf das Volumen. .
0/12/3/9/3
0/12/3/9/4 .
0/12/3/9/5
0/12/3/9/6 .
Erweiterung: .
Das Zwei-Kompartiment-Modell .
Der Arzneistoff wird in einer ersten Phase injiziert und verteilt sich schnell im gut durchbluteten
Gewebe und verteilt sich zwischen den Komparimenten [Wiskowski] . .
0/12/3/9/7
0/12/3/9/8 .
Im peripheren Kompartiment kommt es dabei zu einem Anstieg, der nach Erreichung eines
Maximums zu einem Abfall und zur Entleerung führt. .
Das Zeitverhalten lässt sich durch zwei gekoppelte Differentialgleichungen beschreiben, die man
durch folgende Überlegungen bekommt: .
Die Konzentration im
zentralen Kompartiment vermindert sich proportional zur zur momentanen Konzentration durch Elimination mit der
Eliminationskonstanten .
.
Des weiteren ändert sich
durch den Abfluss in das periphere Kompartiment, was formal ebenfalls einer Elimination entspricht:
. .
Umgekehrt fließt das Pharmakon aus dem peripheren in das zentrale
Kompartiment zurück. Dieser Rückfluss ist proportional zur Konzentration
,
wird aber positiv gerechnet, da er die Konzentration im zentralen Kompartiment erhöht:
. .
Insgesamt ergibt sich .
.
Im peripheren Kompartiment hat man, bis auf die Elimination, die gleiche Bilanz, nur dass die
Vorzeichen umgekehrt gewählt werden müssen, da jeder Verlust des peripheren Kompartiments ein
Gewinn des zentralen Kompartiments, und umgekehrt, ist: .
.
Auflösen lässt sich dieses Differentialgleichungssystem (s. Mathematik II), in dem man für
und
den
Ansatz .
und .
wählt. .
Zu Beginn ist (also die Dosis
verteilt auf das Volumen) und .
.
Mit den Hilfsgrößen .
und .
wird .
und .
. .
Qualitativ sieht die Lösung so aus (für )
.
0/12/3/9/9
0/12/3/9/10 .
0/12/3/9/11
0/12/3/9/12 .
0/12/4
13.4 Bestimmen von Grenzwerten nach L’Hospital
0/12/4/0
13.4.1 Regel von L’Hospital
0/12/4/1
13.4.2 Beispiele
0/12/4/1/0 .
Beispiel 13 - 96
.
| = | |
| L’Hospital: | | | | |
| | = | | = | |
| |
.
0/12/4/1/1
0/12/4/1/2 .
Beispiel 13 - 97
.
.
| = | | | |
| L’Hospital: | | | | |
| | = | | = | | = | | = | |
| |
.
0/12/4/1/3
0/12/4/1/4 .
Beispiel 13 - 98
.
.
| = | |
| L’Hospital: | | | | |
| | = | |
| |
| Bemerkung: | = | | = | |
| |
| | = | |
| L’Hospital: | | | | |
| | = | |
| | = | |
| | = | |
| |
.
0/12/4/1/5 .
Andere unbestimmte Ausdrücke
.
.
Bei solchen Ausdrücken hilft Umformung auf
und nachfolgende
Anwendung der Regel von
0/12/4/1/6 .
Beispiel 13 - 99
.
auf Hauptnenner bringen: | = | |
| | = | | = | |
| | = | | = | 0 |
| |
.
0/12/4/1/7 .
Beispiel 13 - 100
.
Rückblick: .
. In unserem Fall ist . . .
. .
. Also suchen wir den Grenzwert . . .
. Dafür bestimmen wir zuerst den Grenzwert . . .
. Durch Anwenden der Logarithmusregel . . .
. ergibt sich | = | | = | |
| | = | | = | | = | 1 |
| |
Somit ist . . .
.
.
0/12/4/1/8 .
0/13
14 Einführung in die Integralrechnung
0/13/0
0/13/1
14.1 Stammfunktionen
0/13/1/0
14.1.1 Ableitung und Stammfunktion
-
- Beispiel 14 - 1:
.
.
Eine Funktion heißt
Stammfunktion zu ,
wenn
gilt. .
Ist eine
Stammfunktion zu ,
so ist auch eine
Stammfunktion zu .
.
ist
dabei eine beliebige reelle Konstante. .
Es gibt zu jeder stetigen Funktion
unendlich viele Stammfunktionen. .
Die Differenz zweier Stammfunktionen zu einer stetigen Funktion
ergibt
eine Konstante: .
. .
Beispiel 14 - 2:
.
| | | = | |
| | | | = | |
| |
.
Beispiel 14 - 3:
.
| = | | = | |
| | | | = | |
| |
.
0/13/2
14.2 Integration
0/13/2/0
14.2.1 Definition des Integrationsbegriffs
0/13/2/0/0
|
| Integration |
.
Das Aufsuchen sämtlicher Stammfunktionen
zu einer vorgegebenen Funktion
wird als Integration bezeichnet. .
| | | , mit |
| | | | |
| |
.
.
Gesucht ist bei den folgenden Beispielen die Stammfunktion von
bei
.
Beispiel 14 - 4:
.
.
0/13/2/0/1 .
Beispiel 14 - 101
.
.
0/13/2/0/2 .
Beispiel 14 - 102
.
.
0/13/2/0/3 Mit Maxima läßt sich die Stammfunktion bestimmen .
mittels . .
Mit Maple gelingt dies mittels (Achtung:
Palette benutzen !) oder über .
0/13/2/1
14.2.2 Das bestimmte Integral als Flächeninhalt
0/13/2/1/0
Beispiel 14 - 103:
Für die Funktion
soll die Fläche zwischen 1 und 2 berechnet werden. .
0/13/2/1/1
0/13/2/1/2 .
Näherungsweise läßt sich diese Fläche als Untersumme sowie als Obersumme bestimmen. Existiert
nun der Grenzwert .
.
so bezeichnet man ihn als das bestimmte Integral der Funktion
.
in den Grenzen von
bis . .
.
Es wird durch das Symbol
gekennzeichnet. .
0/13/2/2
14.2.3 Unbestimmtes Integral und Flächenfunktion
0/13/2/2/0
Hält man bei dem bestimmten Integral die untere Grenze fest und macht die obere Grenze
variabel, so hängt der Integralwert nur noch von der oberen Grenze ab: 0/13/2/2/1
EndIsUnit
0/13/2/2/2
.
-
1.
- Die Funktion
wird als unbestimmtes Integral von
bezeichnet, da die obere Grenze unbestimmt ist. Es repräsentiert den Flächeninhalt
zwischen der Funktion
und der t-Achse im Intervall
in Abhängigkeit von der oberen Grenze .
-
2.
- Zu jeder stetigen Funktion
gibt es unendlich viele unbestimmte Integrale, die sich in ihrer unteren Grenze voneinander
unterscheiden.
-
3.
- Die Differenz zweier unbestimmter Integrale
und
ist eine Konstante.
0/13/2/3
14.2.4 Fundamentalsatz der Differential- und Integralrechnung
0/13/2/3/0
Vergrößert man die obere Grenze x im Integral
um
, so wächst der
Flächeninhalt um :
.
0/13/2/3/1
0/13/2/3/2 .
Zwischen den Flächeninhalten besteht also die Beziehung .
.
, .
.
und nach Division durch :
.
.
. .
.
Bildet man den Grenzübergang :
.
.
, .
.
so wird mit
.
.
und mit : .
.
und
damit .
.
.
Dies führt zum Fundamentalsatz der Differential- und Integralrechnung:
Jedes unbestimmte Integral
ist eine Stammfunktion zu :
.
.
0/13/2/3/3 .
Beispiel 14 - 103
Gegeben sei die Funktion
-
1.
- Bestimmen Sie
-
2.
- Berechnen Sie
.
-
1.
-
.
-
2.
-
.
.
0/13/2/3/4
0/13/2/4
14.2.5 Grundintegrale
|
|
|
|
|
| | | | | | |
| | | (gilt für ) | | | |
|
|
|
|
|
| | | | | | |
|
|
|
|
|
| | | | | | | | | | | | | |
|
|
|
|
|
| | | | | | |
|
|
|
|
|
| | | | | | | | | | | | | |
|
|
|
|
|
| | | | | | | | | | | | | |
|
|
|
|
|
| | | | | | |
|
|
|
|
|
| | | | | | | | |
|
|
|
|
|
| | | | | | | | | (für )
|
|
|
|
|
| | | | | | | | |
|
|
|
|
|
| | |
.
0/13/3
14.3 elementare Integrationsregeln
0/13/3/0
14.3.1 Faktorregel
0/13/3/0/0
Ein konstanter Faktor darf vor das Integral geschrieben werden: .
.
Beispiel 14 - 104:
.
.
0/13/3/0/1 .
Beispiel 14 - 104
.
.
.
0/13/3/0/2 .
Beispiel 14 - 105
.
.
.
0/13/3/0/3
0/13/3/0/4 .
Beispiel 14 - 106
.
.
0/13/3/0/5 .
Beispiel 14 - 107
.
.
0/13/3/0/6 .
Beispiel 14 - 108
.
.
0/13/3/0/7
0/13/3/0/8 .
Beispiel 14 - 109
.
.
0/13/3/0/9
0/13/3/1
14.3.2 Summenregel
0/13/3/1/0
Eine endliche Summe von Funktionen darf gliedweise integriert werden: .
.
bzw. .
.
Beispiel 14 - 110:
.
.
0/13/3/1/1 .
Beispiel 14 - 110
.
.
0/13/3/1/2 .
Beispiel 14 - 111
.
.
0/13/3/1/3 .
Beispiel 14 - 112
.
.
0/13/3/1/4 .
Beispiel 14 - 113
.
.
.
0/13/3/1/5
0/13/3/2
14.3.3 Vertauschungsregel
Das Vertauschen von Integrationsgrenzen bewirkt einen Vorzeichenwechsel des Integrals:
0/13/3/3
14.3.4 Zusammenfallen der Integrationsgrenzen
Fallen die Integrationsgrenzen zusammen, so ist der Integralwert gleich Null: .
.
0/13/3/4
14.3.5 Zerlegen des Integrationsintervalls in Teilintervalle
Für jede Stelle c aus dem Integrationsintervall
gilt : .
.
0/13/4
14.4 Integrationsmethoden
0/13/4/0
14.4.1 Integration durch Substitution
0/13/4/0/0
Versucht man, das Integral
zu lösen, gelingt dies durch die Substitution mit einer Hilfsvariablen
. .
. .
Ersetzt man nun
und im
Integral durch
bzw. ,
so erhält man ein elementar lösbares Integral: .
. .
Rücksubstitution ergibt: .
. .
Generelle Vorgehensweise:
-
1.
- Aufstellung der Substitutionsgleichungen .
-
2.
- Durchführung der Substitution durch Einsetzen .
.
-
3.
- Integration .
.
-
4.
- Rücksubstitution (s.o.)
0/13/4/0/1 .
Beispiel 14 - 114
.
. . ,
.
.
.
.
0/13/4/0/2 .
Beispiel 14 - 115
.
. . ,
.
.
.
.
0/13/4/0/3 .
Beispiel 14 - 116
.
. . .
.
.
.
.
0/13/4/0/4 .
Beispiel 14 - 117
.
. . .
.
.
.
.
.
.
. Substitution:
. .
: .
.
.
.
.
.
.
.
.
.
.
0/13/4/0/5 .
Beispiel 14 - 118
.
. . .
.
. .
. .
. .
.
.
.
.
.
0/13/4/0/6
0/13/4/1
14.4.2 Partielle Integration
0/13/4/1/0
Beim Integral
wird in
ein Produkt aus
- einer Funktion
und
- der Ableitung
einer Funktion
zerlegt, d.h.
Beispiel 14 - 119:
.
Dieses Integral lässt sich wie folgt darstellen: .
Das Verfahren ist hilfreich, wenn die Stammfunktion von
einfach zu bestimmen
ist. Dann ist das Integral
elementar lösbar.
Erklärung:
.
Nach der Produktregel für Ableitungen ist .
.
Das ganze integriert ergibt .
.
Aus der Beziehung zwischen Differential- und Integralrechnung
.
folgt .
.
Analog: .
Vorgehensweise
-
1.
- Bestimmen von
und
-
2.
- Berechnen von
und
-
3.
-
in .
.
einsetzen und ausrechnen.
Beispiel 14 - 120:
.
.
Schritte: .
-
1.
-
-
2.
-
-
3.
-
in .
.
einsetzen und ausrechnen.
.
0/13/4/1/1 .
Beispiel 14 - 119
.
- .
- .
- .
in .
einsetzen und ausrechnen.
.
0/13/4/1/2
0/13/4/1/3 .
Beispiel 14 - 120
(Achtung: Zweimalige partielle Integration erforderlich!) .
(Attention: Two partial integrations required!)
.
Teil 1:
- . .
- . .
- . .
in .
einsetzen und ausrechnen.
.
Wir müssen nun nochmals die Methode der partiellen Integration anwenden, um .
auszurechnen.Dies erfolgt in
Teil 2:
- . .
- . .
- . .
in .
.
.
.
.
.
.
Die unterschiedlichen Bezeichner für die Integrationskonstanten
sind irrelevant, da eine Konstante multipliziert mit einem beliebigen (ebenfalls konstanten)
Faktor ebenso eine Konstante ergibt. .
.
0/13/4/1/4
Regel zum Auffinden von
und
(die ALPES-Formel , aufgestellt durch meinen Studierenden Thaifa Alae): .
Sind beispielweise zwei Ausdrücke in der Prioritätsliste
-
1.
- A:
-
2.
- L:
-
3.
- P:
-
4.
- E:
-
5.
- S:
zu finden, so wird derjenige Term, der in der Liste weiter unterhalb steht, zu
und derjenige Term, der in der Liste weiter oberhalb steht, zu
.
0/13/4/2
14.4.3 Integration durch Partialbruchzerlegung
0/13/4/2/0
Durch Zerlegung eines Polynoms in eine ganzrationale Funktion und eine echt gebrochenrationale
Funktion lassen sich die Summanden über die bereits eingeführten Integrationsmethoden
integrieren. .
0/13/4/2/1 .
Beispiel 14 - 121
Zur Integration der unecht gebrochenrationalen Funktion .
.
.
.
wird die Funktion zunächst zerlegt in eine ganzrationale Funktion und eine echt gebrochenrationale
Funktion (z.B. mittels des Horner-Schemas) und anschließend die echt gebrochenrationale Funktion
mittels Partialbruchzerlegung weiter zerlegt. .
.
. . . .
. Partialbrüche für die Nullstellen des Nenners: . . (einfache
Nullstelle) .
. . (einfache
Nullstelle) .
. .
. .
. .
. .
. .
. .
. .
. . .
. .
. .
. .
.
.
0/13/4/2/2
0/13/4/3
14.4.4 Übungen
Bitte bearbeiten Sie die Übungen hier .
0/13/5
14.5 Beispiele
0/13/5/0
14.5.1 Bestimmung des Flächenschwerpunkts
0/13/5/0/0
Für einen Körper im Gleichgewicht gilt: .
.
0/13/5/0/1
0/13/5/0/2 .
.
.
.
.
Erweiterung auf mehrere Massen:
.
Als Summenformel:
.
.
0/13/5/0/3 .
Beispiel 14 - 122
Vier Container mit 15, 30, 45 und 15 Tonnen und jeweils 10 m Länge (Schwerpunkt
in der Mitte) sollen entsprechend der Abbildung in ein Flugzeug eingeladen werden. .
.
Die Ladezone beginnt 10 m vom Bug entfernt. Der Hersteller schreibt vor, daß der Schwerpunkt
m vom Bug entfernt sein
muss mit einer Toleranz von
m. Wird durch die gezeigte Ladereihenfolge diese Vorschrift eingeladen ? .
.
Mit
wird der Schwerpunkt . . . .
Das Flugzeug ist also richtig beladen. .
0/13/5/0/4 .
Die Masse von Flächen mit gleicher Dichte
bestimmt sich einfach über .
Die Flächen können gedanklich in Teilflächen zerlegt werden. Kennt man die Einzelschwerpunkte,
so kann man den Gesamtschwerpunkt analog berechnen: 0/13/5/0/5 .
Beispiel 14 - 123
Zu bestimmen sei der Schwerpunkt einer Treppe in x- und y-Richtung. Die Einzelschwerpunkte liegen
jeweils mittig. .
.
Gesamtschwerpunkt .
.
.
.
. . . .
.
.
. .
.
0/13/5/0/6 .
Hat man ebene Flächen, deren Begrenzung über eine Funktion angegeben ist, macht man einen
Übergang von der diskreten Addition zur Integration: .
.
.
.
.
0/13/5/0/7 .
Beispiel 14 - 124
Gegeben sei ein Dreieck, das durch die x-Achse, y-Achse und die Funktion
begrenzt ist: .
Zu bestimmen ist zunächst die x-Koordinate des Schwerpunkts: .
.
.
.
Hierzu zerteilen wir das Dreieck (willkürlich) in lauter senkrechte kleine Stäbchen mit der Fläche
. .
Hiermit sind die Integralgrenzen vorgegeben zwischen 0 und b. .
.
Mit
wird daraus:
, .
eingesetzt in die Integraldarstellung der Schwerpunktsformel: .
.
.
0/13/5/0/8 .
Beispiel 14 - 125
Alternative Berechnung: Wir zerteilen das Dreieck (willkürlich) in lauter waagrechte kleine Stäbchen mit
der Fläche .
.
Hiermit sind die Integralgrenzen vorgegeben zwischen 0 und h. .
Der Schwerpunkt eines einzelnen Stäbchens liegt bei
. Damit
erhält man einen Ausdruck für den Schwerpunkt des Dreiecks: .
.
.
.
.
.
Mit
wird daraus:
, .
eingesetzt in die Integraldarstellung der Schwerpunktsformel: . .
.
.
Dies ist natürlich das gleiche Ergebnis wie vor. .
0/13/5/0/9
0/13/5/0/10 .
Beispiel 14 - 126
Zu bestimmen sei die x-Koordinate des Schwerpunkts der Fläche, die durch die x-Achse, y-Achse und die
Funktion
begrenzt ist.
.
. .
.
.
.
.
0/13/5/0/11
0/13/5/0/12 .
Beispiel 14 - 127
Berechnung des Schwerpunkts eines Viertelkreises: .
Bleibt man hier in der Darstellung kartesischer Koordinaten, wird die Berechnung wesentlich
aufwendiger, wie das Beispiel für die y-Koordinate zeigt: .
.
.
.
.
.
.
Eine alternative Berechnung geht wie folgt: Wir zerteilen den Kreisbogen (willkürlich) in lauter kleine
Kreissegmente .
.
Hier sind die Integralgrenzen einfach angebbar, sie liegen zwischen
und
. .
Haben wir die Schwerpunkte der einzelnen kreissegmente, können wir den Schwerpunkt des
Viertelkreises daraus bestimmen. .
.
Der Schwerpunkt eines einzelnen Stückchens liegt bei
bzw.
. Damit erhält man einen Ausdruck für den Schwerpunkt eines Viertelkreisbogens: .
.
Analog : .
.
0/13/5/0/13 Entsprechend ist der Schwerpunkt eines Halbkreisbogens: .
, und aus
Symmetriegründen: .
.
Bildet man nun die Summe eines Viertelkreises aus diesen Viertelkreisbögen, so ist der Schwerpunkt
.
Weitere Beispiele finden sich in [HibbelerL1] . .
Ist der Gegenstand nun kein ebenes, sondern ein dreidimensionales Gebilde, muss ein Ausdruck für
das jeweilige Massenelement (z.B. Stäbchen) bezüglich x gebildet werden, unter Umständen kann
auch hier eine Integration notwendig werden. Dann spricht man von Mehrfachintegralen. .
Analog können auch die Massenträgheitsmomente
gebildet werden: Für jedes Masseteilchen dm wird das Produkt des Abstandsquadrats zur jeweiligen
Drehachse gebildet und damit das bestimmte Integral für alle Massenteilchen bestimmt. Auf
mathematischer Seite ändert sich hier nichts. .
.
0/14
15 Reelle Matrizen
0/14/0
0/14/1
15.1 Einstieg: Lineare Gleichungssysteme
0/14/1/0
15.1.1 gängige Methoden
In diesem Kapitel werden die Methoden
- Gaußsches Verfahren
- Gauß-Jordan-Verfahren
- Cramer’sche Regel
zur Lösung von Gleichungssystemen einschließlich der Hintergründe behandelt. BeginIsUnit
0/14/1/1
15.1.2 Einige Beispiele zum Einstieg
0/14/1/1/0
Beispiel 15 - 1:
In der Klasse 7c sind 31 Schüler. Die Zahl der Mädchen ist um 3 kleiner als die Zahl der Jungen.
Wie viele Jungen und Mädchen sind in der Klasse ?
| : Mädchen | | : Jungen |
| | | |
| | | |
| |
Beispiel 15 - 2:
Drei Zahnräder eines Getriebes haben zusammen 80 Zähne. Bei 10 Umdrehungen des ersten
Rades drehen sich das zweite 18 und das dritte 45 mal. Wie viel Zähne hat jedes Rad
?
| | |
| | | |
| | | |
| |
Beispiel 15 - 3:
Balken in einem Lager
Ein Balken (Länge )
wird in einem festen Lager links eingespannt und rechts von einem Seil in
einem Winkel von 45 o gehalten. Eine Kraft F wirkt unter dem Winkel
auf die
Mitte des Balkens. 0/14/1/1/1
0/14/1/1/2
Fragestellung der Technischen Mechanik ist bei diesem Beispiel die Bestimmung der Kräfte
und des Moments
in Abhängigkeit
vom Winkel
der angreifenden Kraft F (’Drehachse’ links): .
0/14/1/1/3
0/14/1/1/4 .
.
.
3
Gleichungen, 3 Unbekannte .
Beispiel 15 - 4:
Verschnittkreuz
Gegeben sind die zwei (zu bestimmenden) Mengen
und
eines Weins mit
dem Säuregehalt
und ,
die zusammengemischt werden sollen zu einer (evtl. unbekannten) Gesamtmenge
und einem
Gesamtsäuregehalt .
Die Gleichungen dieses Systems lauten dann:
| + | | = | |
| | + | | = | |
| |
Nun multipliziert man die erste Gleichung mit
: .
| + | | = | |
| | + | | = | |
| |
Subtraktion der zweiten von der ersten Zeile ergibt: .
| + | | = | |
| |
und damit
oder
Die gleichen Schritte werden nach der Multiplikation der ersten Gleichung mit
analog
durchgeführt:
| + | | = | |
| | + | | = | |
| |
Subtraktion der zweiten von der ersten Zeile ergibt:. .
| + | | = | |
| |
und damit
oder .
Kennt man die gesuchte Gesamtmenge nicht, kann man für das Verhältnis von
zu
angeben:
.
Zum besseren Behalten dieser Gleichungen werden die Werte in einem (Verschnitt-)Kreuz
aufgetragen: .
.
|
|
| | | |
| | | |
| | | |
|
|
| | |
.
.
Mit Zahlen: .
.
.
.
Hat man nun eine vorgegebene Menge ,
so kann man die Menge des Weins
einfach bestimmen zu:
und
.
Lösung des Beispiels mit Maple:
restart; eq1 := x1+x2 = M;
eq2 := 3.8*x1+9*x2 = 6.0*M;
solve({eq1, eq2}, {x1, x2,M}) ergibt:
x1 + x2 = M
3.8 x1 + 9 x2 = 6.0 M
{M = 2.363636364*x2, x1 = 1.363636364*x2, x2 = x2}.
Also: ist frei wählbar,
daraus ergibt sich
und daraus wiederum die Gesamtmenge.
0/14/1/1/5 .
Beispiel 15 - 128
Gegeben sind die drei (zu bestimmenden) Mengen
,
und
eines Weins mit
dem Alkoholgehalt
Vol %, Vol
% und
Vol % , die zusammengemischt werden sollen zu einer (evtl. unbekannten) Gesamtmenge
und einem
Gesamt-Alkoholgehalt
Vol %.
( Alkohol
entspricht ;
auf der linken und rechten Seite steht aber die gleiche Einheit. Deshalb kann sie weggelassen
werden.)
Gleichzeitig haben die Weine Säuregehalte von
,
und
,die zusammengemischt den
Ziel-Gesamtsäuregehalt
haben sollen. .
Die Gleichungen dieses Systems lauten:
| + | | + | | = | |
| | + | | + | | = | |
| | + | | + | | = | |
| |
, in Zahlen: | + | | + | | = | |
| | + | | + | | = | |
| | + | | + | | = | |
| |
, Lösung mit Maxima: . .
.
.
.
ergibt : .
Lösung mit Maple: restart; eq1 := x1+x2+x3 = M;
eq2 := 0.08*x1+0.12*x2+0.15*x3 = 0.12*M;
eq3 := 0.03*x1+0.09*x2+0.05*x3 = 0.06*M;
solve({eq1, eq2,eq3}, {x1, x2,x3,M})
ergibt :
;
;
;
;
Die Lösung sagt gleichzeitig, dass man für die Zielzusammensetzung alle drei Weine benötigt. .
.
0/14/1/1/6
0/14/1/1/7 .
Beispiel 15 - 129
Gegeben sind die drei (zu bestimmenden) Mengen
,
und
eines Weins mit
dem Alkoholgehalt
Vol %, Vol
% und
Vol % , die zusammengemischt werden sollen zu einer (evtl. unbekannten) Gesamtmenge
und einem
Gesamt-Alkoholgehalt
Vol %.
Gleichzeitig haben die Weine Säuregehalte von
,
und
,die zusammengemischt den
Ziel-Gesamtsäuregehalt
haben sollen. .
Die Gleichungen dieses Systems lauten: | + | | + | | = | |
| | + | | + | | = | |
| | + | | + | | = | |
| |
, in Zahlen: | + | | + | | = | |
| | + | | + | | = | |
| | + | | + | | = | |
| |
, Lösung mit Maxima: . .
.
.
.
ergibt : .
Lösung mit Maple: restart; eq1 := x1+x2+x3 = M;
eq2 := 8*x1+12*x2+13.5*x3 = 11.0*M;
eq3 := 3.8*x1+9*x2+7*x3 = 6.0*M;
solve({eq1, eq2,eq3}, {x1, x2,x3,M})
Gäbe man als Ziel-Alkoholgehalt nun beisipielsweise
vor,
erhielte man negative Mengenwerte. Diese negativen Werte der Lösung sagen aus, daß für diese
Zielsetzung keine entsprechende Mischung möglich ist. .
0/14/1/1/8 Die Systematik von linearen Gleichungssytemen kann diese
Ergebnisse erklären.
0/14/1/2
15.1.3 Lösen von Gleichungssystemen über äquivalente Umformungen
0/14/1/2/0
Bei einem linearen Gleichungssystem bleibt die Lösungsmenge bei Anwendung der folgenden
Operationen unverändert erhalten (Äquivalente Umformungen eines linearen Gleichungssystems):
-
1.
- Zwei Zeilen können miteinander vertauscht werden.
-
2.
- Jede Gleichung kann mit einer von Null verschiedenen Zahl multipliziert werden.
-
3.
- Zu jeder Gleichung darf ein Vielfaches einer anderen Gleichung addiert werden.
.
0/14/1/2/1 .
Beispiel 15 - 130
| | | | | | Zeilen- | Opera- |
| | | | | | summe | tion | | | | | | | |
| | | | | | +I |
| | | | | | + 5I |
| |
.
Lösungsansatz: Bringe Gleichungssystem auf Dreiecksform
.
| | | | | | |
| | | | | | | |
| | | | | | | /3 |
| | | | | | | | | | |
| | | | | | | |
| | | | | | | +II |
| | |
| | | | | | | |
| | | | | | | |
| | | | | | | |
| |
.
0/14/1/2/2 .
Gauß’scher Algorithmus : Bringe das Gleichungssystem durch geeignete äquivalente Umformungen
in Dreiecksform. Die letzte Zeile enthält die Lösung für eine Variable. Diese Lösung
wird in der zweitletzten Zeile zur Bestimmung der zweiten Variablen verwendet usw. .
0/14/1/3
15.1.4 Übungen
Bitte bearbeiten Sie die Übungen hier .
0/14/1/4
15.1.5 Definition einer reellen Matrix
Matrix : .
| | rechteckiges Schema mit |
| | Zeilen | | | Spalten |
| : | Matrixelemente |
| |
.
A=
.
i wird als Zeilenindex
k wird als Spaltenindex bezeichnet.
Schreibweisen:
Sonderfälle:
:
n-reihige quadratische Matrix oder auch Matrix n-ter Ordnung .
Nullmatrix :
Matrix, deren Elemente sämtlich verschwinden .
Spaltenmatrix:
.
Zeilenmatrix:
.
0/14/1/5
15.1.6 Transponierte einer Matrix
0/14/1/5/0
Vertauschen von Zeilen und Spalten ergibt die Transponierte einer Matrix : .
.
.
.
Beispiel:
.
.
0/14/1/5/1 .
Beispiel 15 - 131
.
.
.
0/14/1/5/2 .
.
.
=
Nebendiagonale
=
Hauptdiagonale
0/14/1/6
15.1.7 Gleichheit von Matrizen
Zwei Matrizen
sind gleich, wenn
für
alle ,
also wenn alle ihre Elemente gleich sind.
0/14/2
15.2 Spezielle quadratische Matrizen
0/14/2/0
0/14/2/1
15.2.1 Diagonalmatrix
für
.
Sind alle ,
so nennt man diese Matrix Einheitsmatrix
.
0/14/2/2
15.2.2 Dreiecksmatrix
alle Elemente oberhalb oder unterhalb der Hauptdiagonalen verschwinden
- Untere Dreiecksmatrix:
für
- Obere Dreiecksmatrix:
für
Beispiel 15 - 132:
Untere Dreieicksmatrix:
.
0/14/2/3
15.2.3 Symmetrische Matrix
.
Beispiel:
.
0/14/2/4
15.2.4 Schiefsymmetrische Matrix
.
Beispiel: .
.
0/14/3
15.3 Rechenoperationen mit Matrizen
0/14/3/0
15.3.1 Addition
0/14/3/0/0
0/14/3/0/1 .
Beispiel 15 - 132
.
.
.
.
0/14/3/0/2 .
Beispiel 15 - 133:
.
Diese Operation ist nicht definiert .
0/14/3/1
15.3.2 Multiplikation mit einem Skalar
0/14/3/1/0
für
alle .
0/14/3/1/1 .
Beispiel 15 - 133
.
.
.
0/14/3/1/2
| kommutativ: | | | |
| | | | | | assoziativ: | | | |
| | | | |
| distributiv: | | | |
| | | | |
| |
0/14/3/1/3 .
Beispiel 15 - 134
.
.
.
.
.
.
.
0/14/3/1/4
0/14/3/2
15.3.3 Multiplikation von Matrizen
0/14/3/2/0
und
.
Die Ergebnismatrix hat 3 Spalten und 2 Zeilen
.
Falk-Schema für die Multiplikation von Matrizen : .
.
| |
|
| | | |
| |
.
|
|
|
|
| | | | | |
|
|
|
|
| | | | | | |
|
|
|
|
|
|
|
|
|
| | | | | | |
|
|
|
|
| | | | | | |
|
|
|
|
| | |
.
.
.
| | |
| | | |
| |
.
Beispiel 15 - 135:
.
.
.
.
.
.
|
|
|
|
|
| | | | | | |
|
|
|
|
|
| | | | | | |
|
|
|
|
|
|
|
|
|
|
|
| | | | | | | |
|
|
|
|
|
| | | | | | | |
|
|
|
|
|
| | | | | | | |
|
|
|
|
|
| | |
.
Multiplikation ist nur zulässig, wenn
.
0/14/3/2/1 .
Beispiel 15 - 135
.
.
.
.
.
0/14/3/2/2
Rechengesetze für die Matrixmultiplkikation:
| Assoziativität: | | | |
| Distributivität: | | | |
| | | | |
| | | | |
| | | | |
| |
Die Matrixmultiplikation ist nicht kommutativ
Man kann jedoch bei Gleichungen mit Matrizen entweder auf beiden Seiten von links oder auf beiden
Seiten von rechts mit einer Matrix multiplizieren (vorausgesetzt natürlich, die Anzahl Spalten bzw.
Zeilen sind dazu passend): .
| | | | |
| | | |
| | | |
| |
0/14/3/3
15.3.4 Übungen
Bitte bearbeiten Sie die Übungen hier .
0/14/4
15.4 Gauß’scher Algorithmus
0/14/4/0
15.4.1 Darstellung in Matrixform
0/14/4/0/0
| | | | | | | umbilden in Matrix: | |
| | | | | | | 1. Spalte: , | 2. Spalte: |
| | | | | | | 3. Spalte: , | 4. Spalte: Konstante |
| |
| | | |
| | | |
| | | |
| |
.
.
Das lineare Gleichungssystem kann geschrieben werden als
. .
Koeffizienten:
Absolutglieder (Konstanten):
| | | | | | |
| | | | | | | |
| | | | | | | |
| | | | | | |
| | | | |
| |
| | | | mit | und |
| |
.
Entsprechend verfolgt jetzt der Gaußsche Algorithmus das Ziel, über äquivalente Umformungen die
Matrix
in ein gestaffeltes System (Dreiecksform) zu bringen durch die Schritte:
-
1.
- Vertauschen von Zeilen
-
2.
- Multiplikation mit einem Faktor
-
3.
- Addition eines Vielfachen einer anderen Zeile
0/14/4/0/1 .
Beispiel 15 - 136
Lösen eines Gleichungssytems mit Excel : .
.
.
.
.
0/14/4/0/2
0/14/4/0/3 .
Beispiel 15 - 137
| | | | | | | umbilden in Matrix: | |
| | | | | | | 1. Spalte: , | 2. Spalte: |
| | | | | | | 3. Spalte: , | 4. Spalte: Konstante |
| |
.
.
| | | | |
| | | | |
| | | | |
|
|
|
|
| | | | | |
| | | | | |
| | | | | |
|
|
|
|
| | | | | |
| | | | | |
| | | | | |
|
|
|
|
| | | | | |
| | | | | |
| | | | | |
|
|
|
|
| | | | | |
| | | | |
| | | | |
|
|
|
|
| | |
. .
Aus Zeile 2 folgt:
. Aus Zeile 1 folgt:
. (alternativ Gauß-Jordan: Später !)
.
0/14/4/0/4
0/14/4/1
15.4.2 Lösungsschritte des Gauß’schen Algorithmus
Die Lösung eines linearen Gleichungssystems
erfolgt durch Umformung in zwei, ggf. drei Schritten:
I. Vorwärtselimination mit
Ia. eventueller Pivotisierung (d.h. Vertauschen von Zeilen, bis die Diagonalelemente
)
II. Rückwärtselimination
I. Vorwärtselimination
-
1.
- Eliminationsschritt: ()
| subtrahiere | -fache der 1.Zeile von 2.Zeile |
| ⋮ | -fache der 1.Zeile von 3.Zeile |
| ⋮ | ⋮ | | |
Durch den ersten Eliminationsschritt entstehen in der 1. Spalte der Matrix Nullen, außer
sind
alle .
-
2.
- Eliminationsschritt: ()
| subtrahiere | -fache der 2.Zeile von 3.Zeile |
| ⋮ | -fache der 2.Zeile von 4.Zeile |
| ⋮ | ⋮ | | |
-
3.
- Solange wiederholen, bis die Dreiecksform vorliegt. (Die Koeffizienten der Matrix
in Dreiecksform werden ab hier der Übersichtlichkeit halber mit Koeffizienten
bzw.
bezeichnet.)
Ia. Pivotisierung
-
1.
- Das Gauß-Verfahren versagt, falls das Diagonalelement oder Pivotelement (engl. für
Dreh- und Angelpunkt)
eines Eliminationsschrittes gleich Null ist,
(Abbruch des Verfahrens bei Division durch Null).
-
2.
- Pivotsuche: Ist ein Diagonalelement ,
so vertauscht man die Pivot-Zeile k vor Ausführung des k-ten Eliminationsschrittes mit
derjenigen Zeile ,
die den betragsmäßig größten Koeffizienten für
besitzt:
-
3.
- Neue Pivotzeile ,
neues Pivotelement .
II. Rückwärtselimination
Aus der Dreiecksform werden die Lösungen
durch schrittweises Rückwärtseinsetzen gewonnen:
-
1.
- Zuerst die unterste Zeile nach
auflösen.
-
2.
- Die anderen Elemente
des Lösungsvektors
bestimmt man dann rekursiv mit der Gleichung
,
.
Sei eine
-Matrix, dann lautet das
Gleichungssystem mit
dem unbekannten Vektor :
| | | | | | | | |
| | | | | | | | | |
| | | | | | | | | |
| | | | | | | | | |
| |
erhält man aus
der letzten Zeile:
Der Wert für
wird in die vorletzte Zeile
eingesetzt, diese nach
aufgelöst:
.
.
Das gleiche Schema wird auf die darüberliegenden Zeilen angewandt, bis alle Werte von
bestimmt sind.
0/14/4/2
15.4.3 Gauß-Jordan-Verfahren
0/14/4/2/0
Alternativ zum beschriebenen Gauß-Verfahren kann man auch die Koeffizientenmatrix noch weiter umformen, bis man
eine Einheitsmatrix
erhält. Damit können die Lösungen direkt abgelesen werden.
oder
Dies ist auch als Gauß-Jordan-Verfahren bekannt.
0/14/4/2/1 .
Beispiel 15 - 138
Alternative Lösung des obigen Beispiels mit Gauß-Jordan: .
| | | | | | | umbilden in Matrix: | |
| | | | | | | 1. Spalte: , | 2. Spalte: |
| | | | | | | 3. Spalte: , | 4. Spalte: Absolutglied |
| |
.
(Anm.: Man kann das Absolutglied zuerst auch auf die linke Seite der Gleichung bringen, man muß
nur beim Ablesen darauf achten.) .
| | | | PS |
| | | | | |
| | | | | | |
| | | | | | |
|
|
|
|
|
| | | | | | | |
| | | | | | |
| | | | | | |
|
|
|
|
|
| | | | | | | |
| | | | | | |
| | | | | | |
|
|
|
|
|
| | | | | | | |
| | | | | | |
| | | | | | |
|
|
|
|
|
| | |
. .
.
0/14/4/2/2
0/14/4/2/3 .
Beispiel 15 - 139
Zu lösen ist das Gleichungssystem .
| | | | |
| | | | | |
| | | | | |
| |
.
| | | | |
| | | | | |
| | | | | |
|
|
|
|
| | | | | | |
| | | | | |
| | | | | |
|
|
|
|
| | | | | | |
| | | | | |
| | | | | |
|
|
|
|
| | | | | | | | | | | | |
| | | | | |
|
|
|
|
| | |
. . .
.
0/14/4/2/4
Beispiele zum Gauß’schen Verfahren
0/14/4/2/5 .
Beispiel 15 - 140
Tragwerke
| | | | |
| | | | | nach |
| | | | | nach |
| | | | | |
| |
.
Pivotisieren:
.
| | | | |
|
|
|
|
| | | | | | |
| | | | | |
| | | | | |
|
|
|
|
| | | | | | |
| | | | | |
| | | | | |
|
|
|
|
| | | | | | |
| | | | | |
| | | | | |
|
|
|
|
| | | | | | |
| | | | | |
| | | | | |
|
|
|
|
| | |
.
.
0/14/4/2/6
0/14/4/2/7 .
Beispiel 15 - 141
.
.
| | | | |
| | | | |
| | | | | | | | | | | | |
| | | | |
| | | | |
| |
| | | | |
| | | | |
| | | | |
| |
Die
Gleichung hat unendlich viele Lösungen
wird
zum Parameter und ist frei wählbar.
Auflösen durch Rückwärtseinsetzen:
.
.
.
.
0/14/4/2/8
0/14/4/2/9 .
Beispiel 15 - 142
| | | | |
| | | | | |
| | | | | |
| |
.
| | | | | |
| | | | | |
| | | | | | | | | | | | | | |
| | | | | | | | | | | | |
| . |
| oder . |
| . |
| | | | | | |
| | | | | |
| | | | | |
| |
| |
Das
Gleichungssystem ist nicht lösbar.
.
0/14/4/2/10
Ein Gleichungssystem hat
| eine oder | | keine oder
| | unendlich viele |
Lösungen. .
Ist das Gleichungssystem homogen (Alle Absolutglieder sind Null,
)
so hat es entweder genau eine Lösung (die Triviallösung
) oder
unendlich viele Lösungen (darunter auch die Triviallösung).
0/15
16 Determinanten
0/15/0
16.1 Einstieg
0/15/0/0
16.1.1 zweireihige Determinanten
0/15/0/0/0
Gleichungssysteme
können wie folgt umgeformt werden:
| | | | |
| | | | | |
| |
| | | | |
 .
.