.
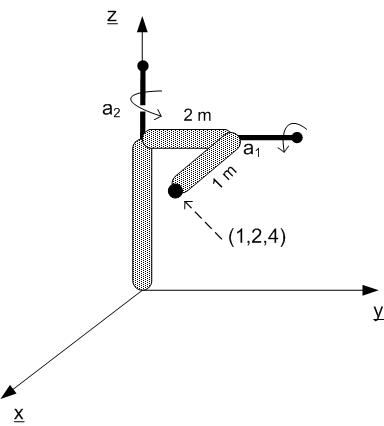
Wechsel des Bezugssytems: Neuer Ursprung (0,2,4). Bezüglich dieses
Bezugspunkts hat die Spitze die
Koordinaten (1,0,0).
.
Drehung um Achse
:
.
.
.
Erneuter Wechsel des Bezugssytems: Neuer Ursprung
(0,0,4). Bezüglich dieses Bezugspunkts hat die (gedrehte) Spitze
die Koordinaten
.
.
Drehung um Achse
:
.
.
.
Die neue Lage der Spitze ist dann nach Transformation
in (0,0,0):
. .
 .
. 